| Titel: | Schieberumsteuerung ohne Anwendung von Excentern oder Gegenkurbeln: von J. Hofmann, Lehrer an der Baugewerkschule in Höxter. |
| Autor: | J. Hofmann |
| Fundstelle: | Band 223, Jahrgang 1877, S. 30 |
| Download: | XML |
Schieberumsteuerung ohne Anwendung von Excentern
oder Gegenkurbeln: von J.
Hofmann, Lehrer an der Baugewerkschule in
Höxter.
Mit Abbildungen im Text und auf Taf. II [d/4].
Hofmann's Schieberumsteuerung.
Ich gehe aus von der Steuerung Heusinger's von Waldegg
Es ist unbegreiflich, daß diese in Belgien so sehr verbreitete Steuerung
(dort allerdings unter dem Namen Walschaert) in
Deutschland bis auf die neueste Zeit fast gar nicht in Anwendung gekommen
ist.; dieselbe besteht aus einem Excenter oder einer Gegenkurbel und einer
Hebelverbindung. Das Excenter ist hierbei mit einem Winkel von 90°
vor- oder rückwärts gegen die Kurbel versetzt; somit hängt die Voreilung
lediglich von der Hebelverbindung ab. Vorliegende Construction hat nun den Zweck, die
Functionen des einen Excenters ebenfalls einem Hebelmechanismus zu übertragen.
I) Für die Lösung der Aufgabe drängt sich zunächst der Gedanke auf, einen Lenker KJ an der Pleuelstange selbst zu befestigen und
diesen durch einen Gegenlenker zu führen. Hierbei fällt aber der Mittelpunkt des
Kreises, in welchem J geführt wird, immer auf die Seite
der Kurbel, und die Aufgabe würde sich so verhältnißmäßig noch am günstigsten
stellen, wenn man den Punkt K in den Kurbelpunkt M selbst verlegte. Ferner muß der Lenker KJ aus später folgenden Gründen lang sein; zugleich soll
aber der Schieber nicht zu weit von der Cylinderachse abstehen. Um also beiden
Forderungen gerecht zu werden, und um zugleich die ganze Construction möglichst auf
die Kreuzkopfführung zusammenzudrängen, habe ich den Punkt K
unter der Pleuelstange gelegt.
Nimmt man nun die Lage von K und die Länge KJ als gegeben an, so handelt es sich darum, die
Länge des Gegenlenkers BJ und dessen festen Punkt
B zu finden. Zu diesem Zwecke stellt man sich die
gleichen Kolbenwegen entsprechenden Lagen von K her und
beschreibt daraus mit der angenommenen Länge KJ
Kreise x. Verbindet man dann die Durchschnittspunkte je
zweier, gleichen Kolbenwegen zugehörigen, geometrischen Orte (x) durch einen Kreis, so ist dessen Mittelpunkt der Punkt B und der Gegenlenker BJ somit gefunden.
Auf dem Wege von J liegen aber die den Kurbelstellungen
über der Achse entsprechenden Punkte viel weiter aus
einander als die für die Kurbelpunkte unter der Achse.
Deshalb muß der Punkt G der Coulisse so in die
(willkürlich gewählten) geometrischen Orte (y) gelegt
werden, daß sich diese Ungleichheit wieder aufhebt. Man hat es hier also noch
vollständig in der Hand, der Coulisse resp. dem Schieber einen größern oder
geringern Ausschlag zu geben, und kann den Coulissenmittelpunkt und die Neigung der
Schieberschubstange so günstig annehmen, wie man will. Die Schieberschubstange EH ist der Radius der Coulisse. Die Bewegung des
Punktes F (bei D geführt)
ist die Bewegung des Schiebers.
Die Untersuchung der Bewegung des Schiebers ist ganz analog der bei der
Heusinger'schen Steuerung. Denkt man sich nämlich zuerst den Kreuzkopf als in Ruhe
befindlich, dann wird die von der Stange JK allein
abhängige Bewegung folgende sein:
Hebt sich die Pleuelstange aus ihrer todten Lage bis zur Höhe der Kurbelstellung vom
Winkel ω, so geht K
und somit auch J annähernd in die Höhe um a/(a + b) r sin ω; daher
Constructionsbedingung, KJ möglichst lang zu
nehmen.
Ist nun n die mit Rücksicht auf die Schieberbewegung und
die Lage des Coulissenmittelpunktes gewählte Verhältnißzahl zwischen dem Wege,
welchen der Punkt G zurücklegt, und dem Wege, den J beschreibt, während die Kurbel von ihrem höchsten zu
ihrem tiefsten Punkte geht, so geht G nach links um den
Betrag
n a/(a +
b) r sin ω
Folglich geht H und ebenso E nach rechts um
(p/o) n a/(a + b) r sin ω
Und somit geht F nach rechts um
(f + g)/g p/o n a/(a + b) r sin ω (1)
Nun denke man sich die Hebestange KJ unberührt, und
die Bewegung des Punktes F lediglich veranlaßt durch die
Bewegung des Kreuzkopfes:
Geht die Kurbel aus ihrer todten Lage heraus um den Winkel ω nach M, so geht der Kreuzkopf von A nach A'. Es ist aber
AA' = r
(1 – cos ω).
Da bei ruhig gedachtem KJ
auch der Punkt E als ruhig anzunehmen ist, so geht Punkt
F nach links um
(f/g) r (1 – cos
ω) (2)
Die Summe beider Bewegungen (1) und (2) ist die wirkliche
Bewegung des Punktes F. Daher geht, wenn sich die Kurbel
aus ihrer todten Lage um ω heraus dreht, der
Punkt F nach rechts um die
Größe
(f + g)/g p/o n a/(a + b) r sin ω – (f/g) r (1 –
cos ω) (3)
Dreht sich die Kurbel bis zu ihrem zweiten todten Punkte, d.h. wird ω = 180°, so ist die ganze vom
Schiebermittelpunkt zurückgelegte Wegeslänge = (2f/g) r. Wenn der
Schieber auf gleiches Veröffnen montirt ist, dann liegt das Schieberspiegelmittel in
der Mitte dieser Strecke, d. i. in
– (f/g) r (4)
Der Ausdruck (3) gibt die Entfernung des Schiebermittels
von dessen Lage im todten Punkte der Kurbel, der Ausdruck (4) die Entfernung des Schieberspiegelmittels von derselben Lage; folglich ist der Schieberweg ξ, d.h. die Entfernung des Schiebermittels vom
Schieberspiegelmittel, gleich der Differenz der beiden Ausdrücke (3) und (4),
oder
ξ =(f + g)/g p/o n a/(a + b) r sin ω + (f/g) r cos ω (5)
Setzt man f/g r = A und (f +
g)/g p/o n a/(a + b) r = B, so stellt sich die Gleichung (5) dar in der Form:
ξ = A
cos ω + B sin ω
Der Schieberweg befolgt demnach hier ganz dasselbe
Gesetz, wie wenn er hervorgerufen wäre durch die Bewegung eines Excenters, und
läßt sich daher auch durch dasselbe Polardiagramm darstellen.
Die Centralcurve für dieses Diagramm ist eine Gerade, senkrecht zur Schubrichtung;
denn der Ausdruck für die Abfassen A/2 = 1/2 f/g r enthält p nicht, ist also constant. Somit ist auch das Veröffnen bei allen Expansionsgraden dasselbe.
Die Ordinaten berechnen sich aus B/2 = 1/2 (f + g)/g p/o n a/(a + b) r. Für größte Füllung ist p/o = q/o, und hierfür wird B/2
zunächst bestimmt. Will man die Schieberkreise für die andern Expansionsgrade, so
hat man nur die Centralcurve der Stellung des Punktes H
entsprechend zu theilen. Z.B. für p = 1/2 q ist p/o = (1/2) (q/o); daher die Ordinate gleich der Hälfte der vorigen
u.s.w.
II) Die vorstehend entwickelte Construction ist natürlich ganz allgemein giltig; aber
die Werthe werden um so schlechter, je mehr der Punkt K
sich dem Kreuzkopf nähert (wegen des Ueberschneidens der verschiedenen
Pleuelstangenneigungen). Anders verhält sich die Sache, wenn man den Punkt K grade unter den Drehpunkt A der Pleuelstange legt; dann fallen die verticalen Erhebungen von K (annähernd) ganz weg, und ich habe hierauf folgende
Construction gegründet:
Mit dem Kreuzkopf verbunden ist der um den festen Punkt S
drehbare Hebel OP, mit der Pleuelstange der im
Punkte G der Coulisse schwingende Hebel UV. Beide Hebel sind durch die Stange PV mit einander verbunden. Die Bewegung von G ist hierdurch vollständig unabhängig von der Bewegung
des Kreuzkopfes; denn wäre U statt an der Pleuelstange
am Kreuzkopfe befestigt, so würde nach den Eigenschaften des Parallelogramms der
Punkt G bei allen Stellungen des Kreuzkopfes in Ruhe sein. Weil
aber U an der Pleuelstange befestigt ist, so beschreibt
G den durch das Hebelverhältniß n/(m + n) bestimmten Theil des Weges BK. Es haben also hier die drei Stangen OP, UV und PV ganz dieselbe Function wie früher die Stangen
KJ, JG und
BJ; aber die Construction ist nun vollständig
auf die Kreuzkopfführung zusammen gedrängt und besonders gut für die Fälle
anzuwenden, wo zwischen Cylinder und Kurbel nur ein geringer Raum disponibel ist,
also für kurze Stangen bei großem Hub. Vom Punkte B des
Kreuzkopfes wird, wie im erstern Falle durch die Lenker QB verbunden, der Hebel QF bewegt, die
Schieberstange bei D geführt u.s.w.
Die Untersuchung der durch diesen Mechanismus hervorgerufenen Schieberbewegung ist
ähnlich der vorigen. Denkt man sich den Hebel QF
losgekuppelt, dann wird, wie sich der Kreuzkopf von A
nach A' bewegt, die Kurbel aus ihrer todten Lage um den
Winkel ω herausgehen, und der relative Weg
zwischen B und K wird
sein:
a/b r sin
ω.
Folglich gehen G bezieh. H und E nach rechts um
n/(m +
n) a/b r sin ω, bezieh. p/q n/(m + n) a/b r sin ω.
Somit geht F nach rechts um die Größe
(f + g)/g p/q n/(m + n) a/b r sin
ω (1)
Denkt man sich nun Q wieder an den Kreuzkopf angekuppelt,
dann geht Q nach rechts um
r (1 – cos ω).
Daher geht F nach links um
f/g r (1
– cos
ω) (2)
Die Summe beider Bewegungen gibt die Bewegung des Punktes F nach rechts um den Betrag
(f + g)/g p/p n/(m + n) a/b r sin ω –
f/g r (1 – cos ω) (3)
Die weitere Entwicklung ist nun ganz gleich der vorigen; daher ist der
Schieberweg
ξ = A
cos ω + B sin ω.
Hierin ist A = f/g r und B = (f + g)/g p/q n/(m + n) a/b r.
Somit ist auch hier wieder das Veröffnen bei allen Expansionsgraden dasselbe.
Um die erlangte Dampfvertheilung an einem Beispiele zu ersehen, füge ich die für eine
kleinere Versuchsmaschine (zu einem Dampfschiffe für 8 Personen) nach beiden
Constructionen I und II projectirten Verhältnisse bei.
I.
f = 16mm
n = 0,51
g = 298
a/(a+b) = 0,476
q = 60
A/2 für die größte Füllung = 2mm,95
o = 111
B/2 „ „
„ „ =
7mm,60
r = 110
Lage von K unter der Pleuelstangenachse 70mm
Länge von KJ = 300mm, JG =
140mm, BJ = 291mm
Länge der Pleuelstange A'M = 840mm
Die festen Punkte B und C
sind auf einem gemeinsamen Ständer.
II.
f = 15mm
n/(m+n) = 0,5
g = 276
r = 110
a/b = 0,19
q = 78
A/2B/2
für größte Füllungd. i. für p/q = 1
= 2mm,99= 5mm,51
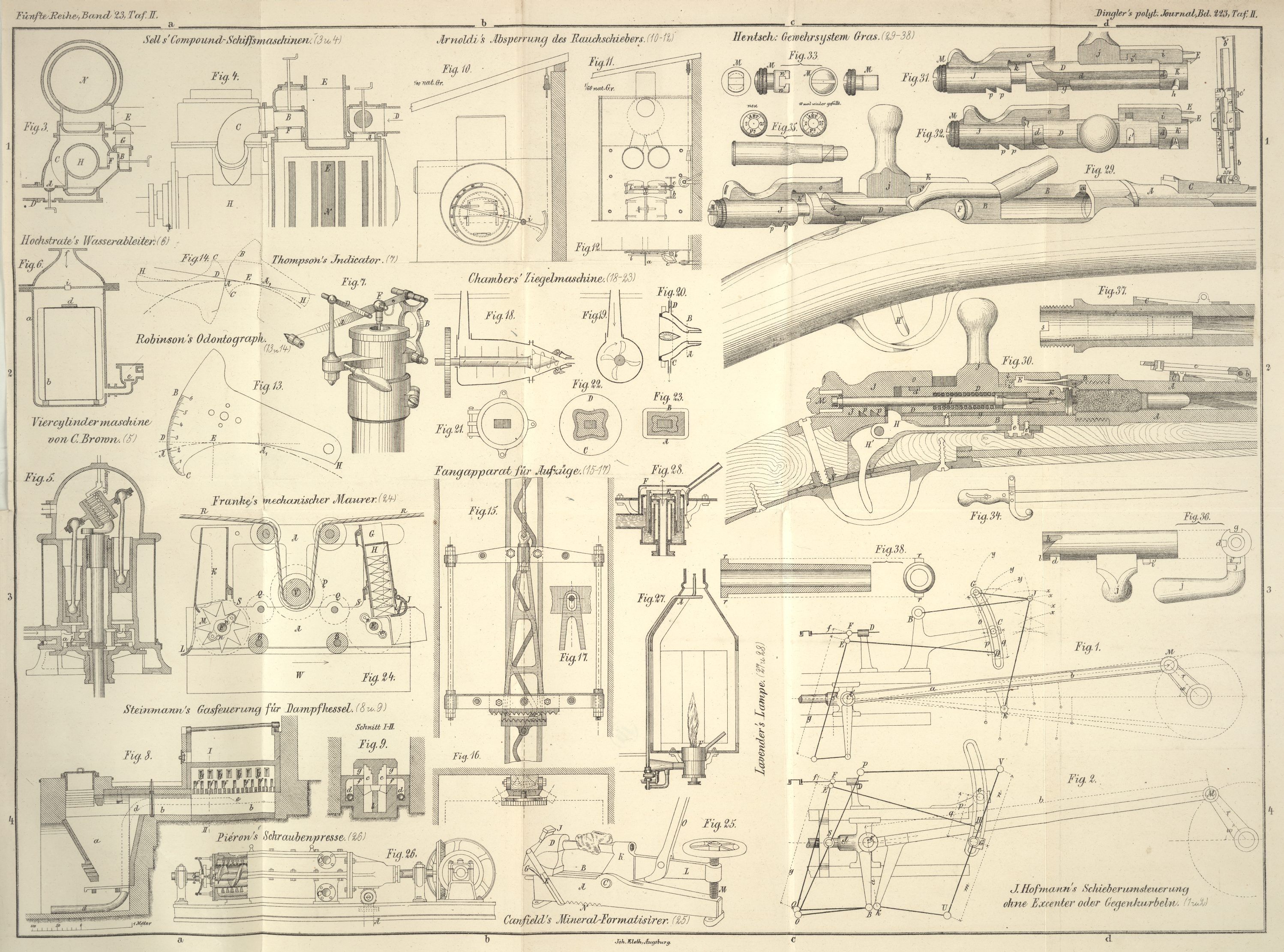
Fig. 1–2., Bd. 223, S. 35
Wie aus den Diagrammen ersichtlich, gibt die Construction II bei raschem Oeffnen des
Schiebers kleine Schieberwege, kleinere Füllungs- und stärkere
Expansionsverhältnisse als Construction I.
Tafeln