| Titel: | Hawkins' Schneckengetriebe. |
| Autor: | M-M. |
| Fundstelle: | Band 227, Jahrgang 1878, S. 20 |
| Download: | XML |
Hawkins' Schneckengetriebe.
Mit einer Abbildung auf Tafel 2.
Hawkins' Schneckengetriebe.
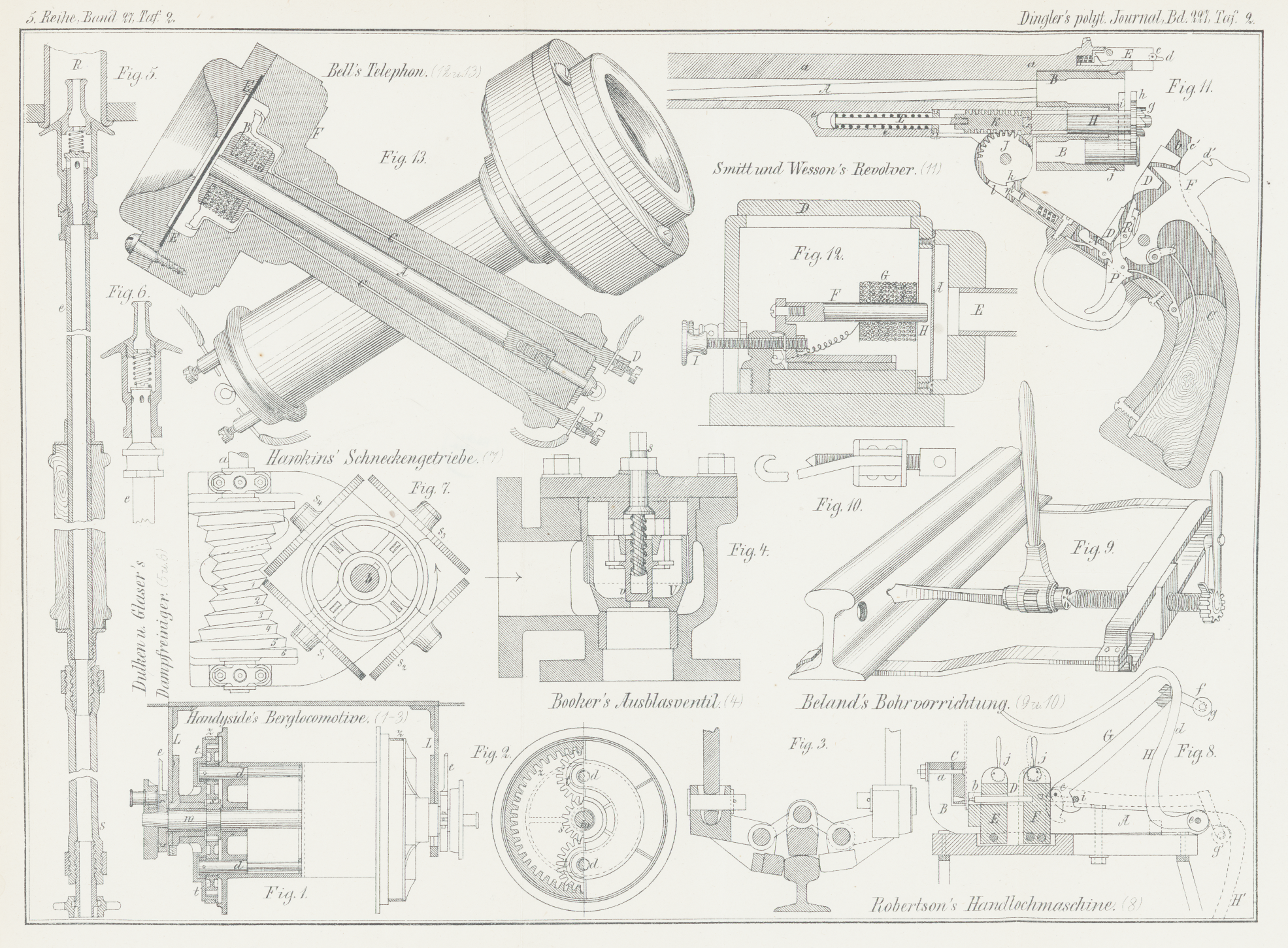
Die in Fig. 7
Taf. 2 nach Engineering, November 1877 S.
350 dargestellte Bewegungsübertragung hat den Zweck, die bedeutende
gleitende Reibung der gewöhnlichen Schneckengetriebe thunlichst zu vermeiden: a stellt die treibende Welle dar, b die getriebene. Letztere trägt auf vier in einem
Radsterne eingesetzten Zapfen frei bewegliche Scheibenräder s1 bis s4, von denen zwei in die Schnecke der Welle a eingreifen. Bei der Drehung von a im Sinne des Pfeiles legt sich der Schneckengang
gegen die Scheibe s1
an, drückt dieselbe nach abwärts und versetzt dadurch die Welle b in Rotation. Indem sich hierbei die Scheibe s1 immer mehr von der
Schnecke entfernt, sind deren Gänge auf einem Rotationskörper geschnitten, dessen
Erzeugende ein der Welle b concentrischer Kreis ist:
ferner muss die Steigung der Schneckengänge, welche der Differenz der Sinusse des
Drehungswinkels von b entspricht, gegen Ende zu immer kleiner werden.
Auf diese Weise ergibt sich die in Fig. 7 ersichtliche
Gestalt der Schnecke, von deren Richtigkeit man sich einfach dadurch überzeugen
kann, dass man die Scheibenräder s auf Pauspapier
copirt und um die Achse b nach und nach umdreht, wobei
das Rad s1 zum
Uebergang von Kante 1 auf 2 bis 5 der Schnecke stets denselben Winkel beschreibt.
Sobald der Gang 6 erreicht ist, verlässt die Scheibe s1 die Schnecke, und die Scheibe s4 kommt mit dem
obersten Schneckengange in Eingriff, auf diese Weise eine ununterbrochene Drehung
der Welle b herbeiführend. Indem s4 nun für eine volle
Vierteldrehung der Welle b mit der Schnecke in Eingriff
bleibt und diese hierbei 10 Umdrehungen beschreibt, so ergibt sich für die
gezeichnete Construction ein Uebersetzungsverhältniss von 40 : 1. Bei umgekehrter
Bewegung der Schnecke kommt zunächst s4, dann s1, s2 und s3 in Eingriff und bewirkt in gleicher Weise die
Drehung von b nach der andern Richtung. Dabei findet
zwischen Schnecke und Scheibe nur rollende Reibung statt, und der Effectverlust der
Bewegungsübertragung beschränkt sich auf die geringe Reibung in den Zapfen der
Scheiben s. Dies ist der wesentliche Vorzug dieser
geistreichen Erfindung welcher deren Anwendung in vielen Fällen als vortheilhaft
erscheinen lässt.
Hawking hat auch daselbe Princip auf die Uebersetzung
drehender Bewegung m langsame geradlinige, zum Ersatz
der gewöhnlichen Uebersetzung durch Schraube und Mutter, angewendet. Es greifen hier
in ähnlicher Weise Scheiben mit geneigten Achsen in die Gänge der Schnecke ein, um
die rollende Reibung statt der gleitenden zu erhalten, eine Zeichnung dieser
letztern Anordnung ist in unserer Quelle nicht gegeben.
M-M.
Tafeln