| Titel: | Radialbohrmaschine von Carl Donnay in Paris. |
| Autor: | J. P. |
| Fundstelle: | Band 230, Jahrgang 1878, S. 219 |
| Download: | XML |
Radialbohrmaschine von Carl Donnay in
Paris.
Mit Abbildungen auf Tafel 22.
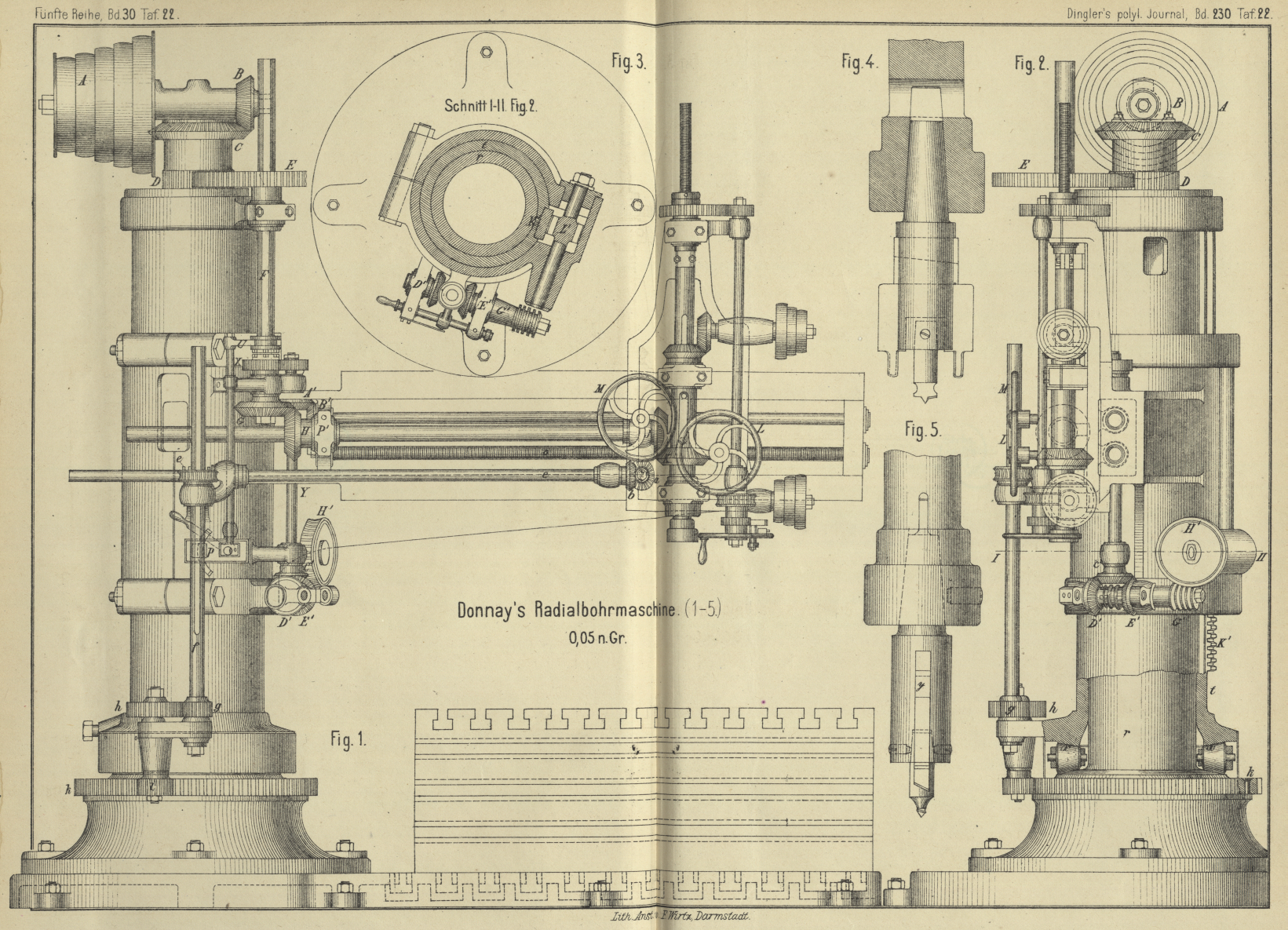
Donnay's Radialbohrmaschine.
Ein schwere, in Bezug auf die auszuführenden verschiedenen Bewegungen sehr
vollkommene Maschine ist die in Fig. 1 bis
3 Taf. 22 in 1/20 n. Gr. nach dem Oppermann's Portefeuille économique, 1878 S. 66 dargestellte freistehende Radialbohrmaschine von C. Donnay in Paris. Dieselbe ist zum Bohren der Löcher
in den Rohrwänden der Schiffskessel bestimmt, welche normal 86mm Durchmesser aufweisen, und diesem Zwecke
entsprechend äuſserst kräftig gebaut. Der Antrieb erfolgt durch die Stufenscheibe
A, welche die conischen Räder B und C in Umdrehung
versetzt; letzteres ist mit dem Stirnrade D durch eine
gemeinschaftliche Nabe verbunden und dieses steht mit dem Rad E in Eingriff, welches auf der verticalen Welle F durch Feder und Nuth befestigt ist. Von dieser Welle
wird in erster Linie durch die Kegelräder G, H und J, K die Bohrspindel angetrieben, in zweiter Linie
durch das Stirnrad X die selbstthätige verticale
Verstellung des radialen Armes hergeleitet. Ist letzteres durch den von der Gabel
U bewegten Muff mit F
verkuppelt, so wird durch ein damit im Eingriffe stehendes Stirnrad die verticale
Welle Y und durch diese das conische Rad C in Umdrehung versetzt, welches mit den beiden lose
laufenden Kegelrädern D', E' in Eingriff steht. Je
nachdem nun D' oder E' mit
der Achse der Schnecke G' verkuppelt wird, dreht sich
diese nach rechts oder nach links. Von der Schnecke G'
wird die Bewegung mittels Schneckenrad H' auf das
Getriebe L' übertragen, welches in die Zahnstange K' eingreift und an dieser die Aufwärts- und
Abwärtsbewegung der Lagerhülse des radialen Armes bewirkt. Die Zahnstange K' ist an der um die Säule r drehbaren Hülse t befestigt und dient in
ihrem oberen Theile zugleich als Führungskeil, um die gegenseitige Verdrehung beider
Hülsen zu verhindern.
Sämmtliche erforderlichen Bewegungen, von welchen noch die verticale Zuschiebung der
Bohrspindel in bekannter, aus der Zeichnung ersichtlichen Weise selbstthätig
ausgeführt werden kann, können auch durch den die Maschine bedienenden Arbeiter von
Hand vorgenommen werden,
und zwar durchwegs vom Bohrzeugträger aus. Hierin liegt natürlich ein ganz
bedeutender Vortheil; der Arbeiter hat nicht nöthig, erst vom Bohrer zur Säule oder
zum Ende des radialen Armes zu gehen, um diesen vertical zu verstellen, zu drehen
oder um den Bohrzeugträger auf dem radialen Arme zu verschieben. Er hat die
Handräder für alle drei Bewegungen bequem zur Hand am Bohrzeugträger selbst, sowie
das Handrad zur verticalen Verstellung der Bohrspindel: für die Verdrehung des
radialen Armes um die Säulenachse das Handrad Z, für
die verticale Verstellung des radialen Armes auf der Hülse t das Handrad M und endlich für die
horizontale Verschiebung des Bohrzeugträgers auf dem radialen Arme das Handrad L. Das Handrad Z ist hier
nicht gezeichnet, es kommt auf die Achse Z' zu sitzen.
Die Handräder L, M, Z liegen nämlich mit ihren Kränzen
in gemeinschaftlicher Ebene und können der Achsenentfernung wegen nicht sämmtlich
gleichzeitig am Platze sein, was jedoch nicht von Belang ist. Es wird beim Gebrauche
das Handrad M abgezogen, wenn jenes auf Z' erforderlich ist, wenn also der radiale Arm im
Kreise gedreht werden soll. Die Mechanismen, welche die von den Handrädern
eingeleiteten Bewegungen vollführen, sind aus der Zeichnung klar ersichtlich. L treibt ein Paar Kegelräder, wovon das auf der
Schraubenspindel o sitzende im Bohrzeugträger
unverschiebbar gelagert ist und das Muttergewinde zu dieser Spindel enthält. M treibt durch ein Paar dahinter liegender Kegelräder
die Achse N und diese durch conische Räder B',A' wieder die verticale Welle Y. Z endlich treibt mittels der conischen Räder a und b die genuthete
Welle c und diese durch Schnecke und Schneckenrad e die verticale Welle f
und weiter durch Stirnräder g, h das Getriebe i, welches sich auf dem feststehenden Zahnkranze k abwälzt. Zur Erleichterung der Drehbewegung ist die
Hülse t auf 10 conische Rollen x gestellt, deren Achsen durch zwei concentrische, mittels Schrauben fest
mit einander verbundene Ringe am Platze gehalten werden.
Die von Marine-Ingenieuren vorgeschriebenen Hauptdimensionen der
Maschine sind folgende: Horizontale Verschiebung des Bohrzeugträgers = 1600mm; verticale Verschiebung der Bohrspindel =
300mm, verticale Verschiebung des radialen
Armes = 800mm; gröſste Ausladung der Bohrspindel =
2500mm; gröſste Höhe bis unter den Bohrer =
1800mm; normaler Durchmesser des Bohrloches =
86mm; gröſster Durchmesser desselben = 110mm. Der radiale Arm ist im vollen Kreise drehbar.
Das totale Gewicht der Maschine beträgt 14t, der
Preis derselben 14000 Franken. In der Fabrik vorgenommene Versuche ergaben folgende
Resultate beim Bohren eines Loches von 86mm
Durchmesser: Anzahl der minutlichen Umdrehungen der Bohrspindel = 23;
Umfangsgeschwindigkeit des Bohrers in der Secunde 110mm; Arbeitswiderstand beim Bohren = 1000k; erforderlicher Arbeitsaufwand in der Secunde = 1e3; Dauer der Arbeit = 10 Minuten.
Das zum Bohren verwendete Werkzeug ist in Fig. 4 und
5 Taf. 22 in 1/10 n. G. dargestellt. Daſselbe ist mittels einer
schwach conischen Angel in das Ende der Bohrspindel eingesteckt und durch einen
Flügelzapfen gegen
Verdrehung gesichert. In der Mitte desselben befindet sich ein Bohrer, welcher
zuerst einsin Loch von 25mm Durchmesser herstellt und
darin mit seinem cylindrischen oberen Theile als Führung dient, wenn das
Doppelmesser y zum Angriff kommt. Durch letzteres wird
aus der Blechtafel ein Ring von 55mm äuſserem
Durchmesser herausgeschnitten, welcher schon vorher auf 25mm ausgebohrt wurde. Zum Aufspannen des
Arbeitsstückes dient die groſse gehobelte, mit Aufspannschlitzen versehene
Grundplatte und ein transportabler kastenförmiger Tisch. Letzterer ist auf zwei
Seiten mit Aufspannschlitzen versehen und gestattet das Aufspannen von Gegenständen
in zwei verschiedenen Höhen, je nach der Wahl seiner Auflagfläche, und an der
Seite.
Mit einem an Stelle des Bohrzeugträgers einzustellenden Fräszeugträger und dazu
gehöriger selbstthätigerselbsthätiger Schaltbewegung in horizontaler Richtung auf dem radialen Arme soll diese
Maschine auch als Fräsmaschine verwendbar gemacht werden. Die selbstthätige
Schaltbewegung hierfür soll gleichfalls von dem Stirnrade X abgeleitet werden.
J. P.
Tafeln