| Titel: | Das Cosinuspendel in seiner Anwendung bei Regulatoren und Tachometern. |
| Fundstelle: | Band 231, Jahrgang 1879, S. 498 |
| Download: | XML |
Das Cosinuspendel in seiner Anwendung bei
Regulatoren und Tachometern.
Mit Abbildungen im Text und auf Tafel 44.
(Schluſs von S. 464 Bd. 230.)
Ueber die Anwendung des Cosinuspendels.
2) Der Cosinusregulator mit verticaler
Welle ist in D. p. J. * 1877 224 19 bereits so
ausführlich behandelt, daſs hier darauf einfach verwiesen werden kann.
3) Das Buſs'sche Tachometer.
Daſselbe ist ein continuirlicher Geschwindigkeitsmesser, welcher die
Winkelgeschwindigkeiten oder Tourenzahlen rotirender Wellen mittels Zeiger und
Zifferblatt in jedem Augenblick anzeigt.
Textabbildung Bd. 237, S. 499In dem ersten Abschnitte dieses Berichtes ist gezeigt worden, daſs, wenn
irgend ein homogener Rotationskörper durch eine Ebene, welche die geometrische Achse
desselben schneidet, in zwei gleiche Hälften getheilt wird, jede Hälfte ein
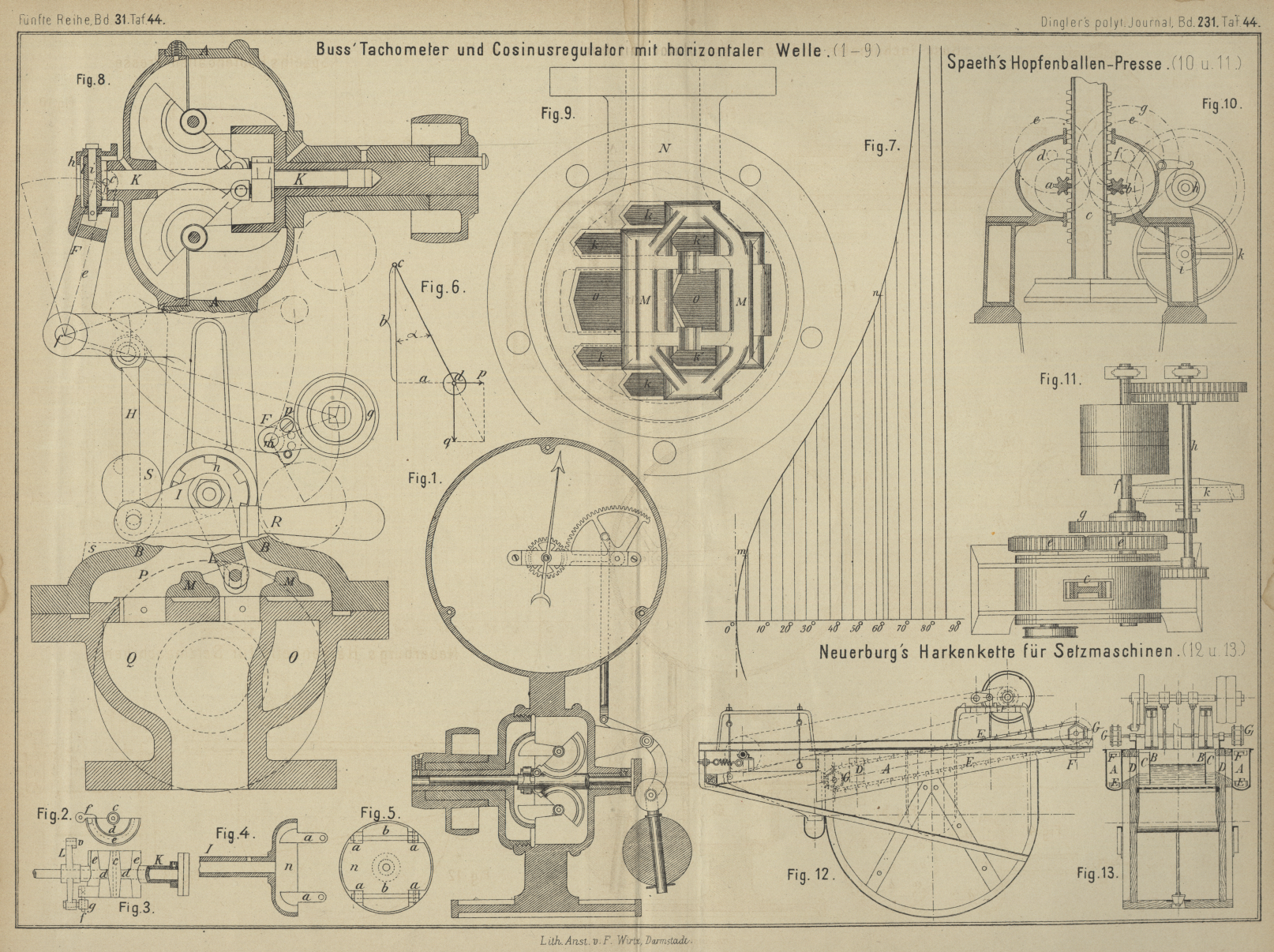
Cosinuspendel bildet. In dem Tachometer, welches beistehend und in Fig. 1 Taf.
44 dargestellt ist, kommen nun Pendel der eben erwähnten Art zur Anwendung.
Der ganze Apparat ist in einem Guſskörper untergebracht, der aus einem cylindrischen
Gehäuse, einem Fuſse und einem flachen Uhrwerkgehäuse besteht. Die guſseiserne,
hohle Antriebswelle I (Fig. 4 und
5 Taf. 44), welche in einem cylindrischen Auge läuft, das am Deckel des
cylindrischen Gehäuses angegossen ist, trägt im Innern des Apparates eine Schale n mit vier Vorsprüngen a.
Die Antriebsriemenscheibe ist mit ihrer langen Nabe über das nämliche Auge gesteckt
und nur mittels einer Mitnehmerschraube mit der Welle I
verbunden, so daſs die von der Riemenscheibe ausgeübten Seitendrucke von dem
feststehenden Auge aufgenommen und folglich nicht auf die Antriebswelle übertragen
werden können.
Jedes Pendel (Fig. 2 und
3 Taf. 44) besteht aus einer langen Nabe c,
einer halbrunden Scheibe d und einem Halbringe e, welcher an einem seitlichen Lappen den Stift f trägt. Die Nabe d eines
Pendels kommt je zwischen zwei der Vorsprünge a zu
liegen und ist daselbst um eine Stahlachse b drehbar.
Die beiden Stifte f dringen als Drehzapfen durch die
langen durchbohrten Köpfe der zwei Bolzen g, welche
selbst in zwei gegenüber liegenden, mit der Hauptwelle parallelen Bohrungen des
Bügels L liegen. Die Bolzen sind in diesen Bohrungen
gegen achsiale Verschiebungen festgehalten, so daſs sie die Bewegungen der Pendel
auf den Bügel L und auf die damit fest verbundene hohle
Muffwelle K übertragen. An ihrem äuſsersten Ende trägt
diese Welle einen Ring, der sich gegen eine ebene, nicht rotirende Platte anlegt.
Eine mit der erwähnten Platte fest verbundene, cylindrische Stange dringt sowohl
durch die Muffwelle K, als auch durch die Antriebswelle
l und ist durch eine vortretende Schiene, welche
zwischen zwei Rollen liegt, verhindert, an der Drehung Theil zu nehmen. An einem mit
dem cylindrischen Gehäuse zusammengegossenen, gabelförmigen Vorsprung ist ein
belasteter Hebel gelagert. Derselbe trägt die zwei schon erwähnten Frictionsrollen
und ein kugelförmiges Gewicht. Er steht mittels seines seitlichen Armes mit einer
Zugstange in Verbindung, welche die Bewegungen auf das Uhrwerk überträgt. Das letztere befindet sich im
Innern des flachen Gehäuses und besteht einfach aus einem Zahnbogen und einem
kleinen Zahnrade. Die Achse des Zahnbogens dringt durch die Rückwand des Gehäuses
und trägt auſserhalb desselben einen Hebel, welcher mit der schon erwähnten
Zugstange in Verbindung steht. Das mit dem Zahnbogen in Eingriff stehende Rad
ertheilt dem Zeiger, auf dessen Welle es angebracht ist, die jeweiligen Bewegungen.
Eine kleine Spiralfeder sucht den Zeiger nach seiner Anfangslage hin zu pressen und
beseitigt dadurch die Ungenauigkeiten, die andernfalls in Folge des todten Spieles
der Zähne auftreten würden.
Das Instrument functionirt folgendermaſsen: Auf der Welle, deren Geschwindigkeit
bestimmt werden soll, ist eine Riemenscheibe angebracht, die entweder den gleichen
oder bei geringer Geschwindigkeit den 5 fachen Durchmesser der
Tachometer-Riemenscheibe besitzt. Wird nun die Hauptwelle I des Tachometers von der eben genannten Riemenscheibe aus angetrieben, so
daſs die beiden Pendel in Umdrehung versetzt werden, so sucht die Centrifugalkraft
derselben ihre Schwerpunkte von der Achse zu entfernen. Die Stifte f üben daher auf den Bügel L, sowie auf die Muffwelle K einen Druck aus,
welcher die nicht rotirende Platte von dem Instrument zu entfernen sucht. Der
belastete Hebel erzeugt indeſsen mittels seiner Frictionsrollen auf die nämliche
Platte einen Gegendruck, der mit dem Ausschlagwinkel des Hebels wächst. Da der von
den Pendeln ausgeübte Druck mit dem Quadrat der Winkelgeschwindigkeit wächst, so
wird der Hebel bei groſser Geschwindigkeit der Welle I
um einen groſsen, bei geringer Geschwindigkeit um einen kleinen Winkel abgelenkt.
Die Lage des Hebels liefert folglich einen Maſsstab für die Winkelgeschwindigkeit
der Welle L
Wie in dem ersten Abschnitt bewiesen wurde, ist die in dem Schwerpunkt angreifende
resultirende Centrifugalkraft eines Cosinuspendels vollständig unabhängig von dem
Ausschlagwinkel desselben und bei einer gegebenen Geschwindigkeit für alle
Pendellagen gleich. Nun bildet die Verbindungslinie zwischen Schwerpunkt und
Drehachse b eines Pendels mit der Verbindungslinie
zwischen Stift f und Achse b einen rechten Winkel. Da die im Schwerpunkt gemessene Centrifugalkraft
eines Pendels radial wirkt, während der Stift f auf die
Muffwelle K einen genau achsial gerichteten Druck
ausübt, so muſs auch dieser letztere von der Pendellage völlig unabhängig sein und
nur mit dem Quadrat der Winkelgeschwindigkeit wachsen. Der in der Muffwelle
auftretende Achsialdruck ist folglich auch nicht von der Lage dieser Welle selbst,
sondern nur von der Winkelgeschwindigkeit abhängig.
In Fig.
6 Taf. 44 stelle cd den belasteten Hebel dar
und es sei: p der von der Muffwelle K ausgeübte horizontale Druck,
q die in den Rollenachsen gemessene, von dem Hebelgewicht erzeugte
Verticalkraft,
α der Ausschlagwinkel des Hebels,
a und b die Projektionen des Hebelarmes cd,
so muſs, damit Gleichgewicht stattfinde,
\frac{p}{q}=\frac{a}{b} sein. Nun ist q eine constante und p eine mit dem Quadrat
der Winkelgeschwindigkeit ω wachsende Kraft, so daſs
sich setzen läſst: p=\beta\omega^2, wobei β irgend eine von den Pendeldimensionen abhängige Constante
bezeichnet.
Aus den zwei Gleichungen folgt:
\omega^2=\frac{a}{b}=\frac{q}{\beta} oder, da
\frac{a}{b}=tg\;\alpha ist, so folgt
tg\;\alpha=\frac{\beta}{q}\,\omega^2. Diese Gleichung, in
welcher \frac{\beta}{q} eine Constante bezeichnet, drückt den
Zusammenhang aus, welcher zwischen dem Ausschlagwinkel α des Hebels und zwischen der Winkelgeschwindigkeit ω der Welle I besteht. Aus derselben ergibt sich die
nachfolgende Tabelle, für welche das Gewicht des Hebels so gewählt ist, daſs
\frac{\beta}{q}=1 ist.
Winkelφ
Winkel-geschwindigkeitω
Winkelφ
Winkel-geschwindigkeitω
4° oder 184°
0,2644
50° oder 230°
1,0917
5 „ 185
0,2958
55 „ 235
1,1950
10 „ 190
0,4199
60 „ 240
1,3161
15 „ 195
0,5176
63 „ 243
1,4009
20 „ 200
0,6033
65 „ 245
1,4644
25 „ 205
0,6829
70 „ 250
1,6575
30 „ 210
0,7598
75 „ 255
1,9318
35 „ 215
0,8368
80 „ 260
2,3815
40 „ 220
0,9160
85 „ 265
3,3808
45 „ 225
1,0000
90 „ 270
∞
Werden die Ausschlagwinkel α als Abscissen, die
Winkelgeschwindigkeiten ω als Ordinaten aufgetragen, so
ergibt sich das Diagramm Fig. 7 Taf.
44.
Das Tachometer wird nun gewöhnlich so gebaut, daſs der belastete Hebel innerhalb der
Winkel 4 bis 63° ausschlägt, oder mit anderen Worten, es wird dasjenige Curvenstück
benutzt, welches in Fig. 7
zwischen den Punkten m und n liegt. Dem geringsten Ausschlagwinkel des Hebels entspricht nach der
Tabelle eine Winkelgeschwindigkeit von 0,2644, dem gröſsten dagegen eine solche von
1,4009 = 5,26 × 0,2644. Die höchste angezeigte Geschwindigkeit beträgt also das
Fünffache der geringsten, und dieses groſse Intervall, innerhalb dessen das
Instrument anzeigt, ist der Anwendung der Cosinuspendel zu verdanken.
Wie aus Fig. 7 ohne Weiteres ersichtlich ist, verläuft die Curve zwischen m und n annähernd geradlinig, so daſs ein mit
dem belasteten Hebel direct verbundener Zeiger, welcher bestimmt wäre, die
Geschwindigkeit anzuzeigen, schon eine annähernd gleichförmige Scale bekommen würde.
Nun besitzen aber die beiden Hebel, welche durch die verticale Zugstange verbunden
sind, ungleiche Längen und zwar ist der obere der kürzere. Es findet daher in den
beiden Endstellungen der Hebel eine stärkere Bewegungsübersetzung statt, als in den
Mittellagen. Auf diesem Wege wird eine Scale erzielt, welche von einer mit dem
Zirkel gleichförmig getheilten mit blosem Auge kaum zu unterscheiden ist.
Da, wie gezeigt worden ist, der von den Pendeln auf die Muffwelle K ausgeübte Druck nicht von der Lage dieser Welle,
sondern nur von der Winkelgeschwindigkeit abhängig ist, so würde eine Verlängerung
oder eine Verkürzung dieser Welle auf die Gleichgewichtslage des belasteten Hebels
keinen Einfluſs ausüben. Tritt daher nach längerem Gebrauch des Instrumentes an der
Spurplatte der Muffwelle K eine Abnutzung ein, so wird
auch diese die Genauigkeit des Instrumentes nicht im Mindesten beeinträchtigen, und
dieser praktisch sehr wichtige Vorzug läſst sich nur durch die Anwendung von
Cosinuspendeln erzielen.
Bei jeder Bewegung des belasteten Hebels verschiebt sich die rotirende Muffwelle in
einem feststehenden Auge, während die zu innerst liegende, nicht rotirende Stange
eine gleichzeitige Achsialbewegung in der rotirenden Antriebswelle ausführt.
Zahlreiche Versuche ergaben nun das Resultat, welches sich auch vornherein erwarten
lieſs, daſs eine cylindrische Welle einer Achsialverschiebung nur eine äuſserst
geringe Reibung entgegensetzt, wenn sie sich relativ zu dem umhüllenden Lager in
rascher Rotation befindet. Die Muffwelle hat aus diesem Grunde bei ihren
Achsialbewegungen eine so verschwindend kleine Reibung zu überwinden, daſs das
Instrument eine auſserordentliche Empfindlichkeit besitzt und selbst die feinsten
und zartesten Geschwindigkeitsschwankungen anzeigt.Das Tachometer ist in Deutschland, sowie in den meisten industriellen Ländern
patentirt und wird von der Firma Buſs, Sombart und
Comp. in Magdeburg (*D. R. P. Nr. 1035 vom 1. November 1877,
Zusätze Nr. 1412 vom 3. November 1877 und Nr. 2767 vom 19. März 1878)
geliefert. Auf der Pariser Ausstellung 1878 waren der „Cosinusregulator
mit verticaler Welle“ und das „Buſs'sche Tachometer“ in der französischen Abtheilung
ausgestellt und erhielten die silberne Medaille.
4) Der Cosinusregulator mit horizontaler
Welle. Der wesentlichste Theil dieses Apparates stimmt mit dem
Hauptmechanismus des eben beschriebenen Tachometers fast in allen Theilen überein.
Es ist dies der ganze Mechanismus, der in dem Gehäuse A
(Fig. 8 Taf. 44) eingeschlossen ist. Die beiden halbringförmigen Pendel
üben, sobald sie sich in Drehung befinden, auf die Stange K einen Druck aus und suchen dieselbe aus dem Gehäuse herauszustoſsen. Ein
belasteter Hebel F übt auf die nämliche Stange einen Druck in
umgekehrtem Sinne aus.
Der wesentliche Unterschied zwischen diesem Apparate und dem Tachometer besteht nun
darin, daſs, während bei dem letzteren ein einarmiger belasteter Hebel gegen die
Muffwelle drückte, dies bei dem Regulator einem Winkelhebel zufällt. Dieser letztere
ist um f drehbar und trägt zwischen einer Gabel seines
nach oben gekehrten Armes e ein Gehäuse h; innerhalb desselben ist die Platte l angebracht und so angeordnet, daſs sie sich um den
verticalen Zapfen i etwas drehen läſst. Das äuſserste
Ende der Muffwelle K ist mit einer runden Scheibe
versehen, welche sich als Spurzapfen gegen die Platte l
anlegt. Der Drehpunkt c entspricht hier dem
Rollenmittelpunkt des Tachometers. Der untere gebogene Arm des Winkelhebels F trägt das Gewicht g.
Bilden beide Hebelarme genau einen rechten Winkel, so übt der Winkelhebel in c einen unveränderlichen Horizontaldruck aus. Da nun,
wie schon bei dem Tachometer nachgewiesen wurde, der von der Muffwelle K ausgeübte Druck nur von der Winkelgeschwindigkeit,
nicht aber von der achsialen Lage der Muffwelle selbst abhängt, so kann ein
rechtwinkliger Hebel F nur für eine ganz bestimmte
Winkelgeschwindigkeit Gleichgewicht herbeiführen. Für diese Geschwindigkeit besteht
dann aber auch in allen Lagen des Hebels und der Muffwelle Gleichgewicht, d.h. der
Regulator ist vollkommen asiatisch. Würden die beiden
Arme des Winkelhebels F dagegen einen gestreckten
Winkel bilden, so wäre die Wirkungsweise des Apparates genau mit derjenigen des
Tachometers übereinstimmend. Einem Ausschlagwinkel von etwa 60° würde also eine
Verfünffachung der Geschwindigkeit entsprechen, d.h. der Regulator wäre
auſserordentlich stabil.
Schlieſsen die beiden Arme des Hebels F irgend einen
stumpfen Winkel ein, so muſs die Wirkungsweise zwischen diejenige des astatischen
Regulators und zwischen diejenige des stabilen Tachometers hineinfallen. Der
Regulator wird also immer noch stabil bleiben.
Da nun für die Zwecke der Praxis ein Regulator so construirt sein soll, daſs er in
seiner höchsten Lage eine Geschwindigkeit besitzt, die nur um wenige Procente
gröſser ist als diejenige, welche seiner tiefsten Lage entspricht, oder mit anderen
Worten, da die Stabilität eines Regulators im Verhältniſs zu der des beschriebenen
Tachometers auſserordentlich gering ausfallen soll, so wird auch der Winkel, welchen
die beiden Arme des Hebels F mit einander bilden, nur
wenig mehr als einen rechten betragen müssen. Um nun den Apparat den
verschiedenartigsten Bedürfnissen nach Belieben anpassen zu können, ist der untere
Arm des Hebels so construirt, daſs der genannte Winkel innerhalb gewisser Grenzen
verändert werden kann. Der Hebel ist nämlich in der Nähe des Gewichtes g mit einem Gelenk versehen, um welches das Gewicht
relativ zu dem Hebel gehoben oder gesenkt werden kann. Ein kleiner Stift p dient dazu, das Gewicht in der einmal eingenommenen Lage festzuhalten.
Das Gewicht selbst besteht aus einem guſseisernen Rohr, in welches cylindrische
Gewichte von beliebiger Gröſse eingesetzt werden können.
Der so weit beschriebene Apparat bildet den eigentlichen Regulator und könnte für
sich zur Regulirung von Umtriebsmaschinen aller Art verwendet werden. Durch die
Beweglichkeit des Gewichtes um den Punkt m kann der
Apparat von vollkommener Astasie an bis zu jedem beliebigen, für die Praxis
verwendbaren Grade von Stabilität verstellt werden; durch die Veränderlichkeit des
Gewichtes (Einsetzen gröſserer oder kleinerer Gewichte) kann die Geschwindigkeit des
Apparates den jeweiligen Bedürfnissen angepaſst werden.
In Fig.
8 und 9 Taf. 44
ist der Regulator in Verbindung mit einem neuen entlasteten Drosselventil
gezeichnet. Von dem Winkelhebel F aus werden die
Bewegungen des Regulators mittels einer Zugstange H auf
einen Hebel I übertragen, dessen Achse durch die
Stopfbüchse n geht und im Innern des Gehäuses B einen Gabelhebel L
trägt, welcher mit dem entlasteten Drosselschieber M in
Verbindung steht. Dieser gleitet auf einer ebenen Spiegelfläche und modificirt je
nach der Stellung des Hebels die Durchströmungsöffnungen der Dampfkanäle k, k' und o. Der Dampf
tritt durch das Rohr N nach dem Einfluſsraume O, von da durch die Einströmungskanäle k, k' nach dem Zwischenraum (Schieberraum) P und verläſst letzteren durch die Ausfluſskanäle O, um sich nach dem Ausfluſsraume Q und von da nach dem Schieberkasten der Dampfmaschine
zu begeben. Schieber und Kanäle sind so construirt, daſs erstens die Summe der
Flächeninhalte der ganzen Ausfluſskanäle O gleich ist
der Summe der Flächeninhalte der ganzen Einlaufkanäle k,
k', und daſs ferner auch für jede Schieberstellung von vollständigem
Oeffnen bis zu völligem Schlieſsen die Summen der abgedeckten Theile der Einlauf-
und der Ausfluſskanäle einander gleich sind. Sind diese Bedingungen erfüllt, so ist
der Schieber bis auf sein eigenes Gewicht vollständig entlastet, da einerseits über
dem Schieber immer der mittlere Druck zwischen dem im Einfluſsraum O und im Ausfluſsraum Q
vorhandenen Drucke herrscht, und da andererseits die Fläche, auf welche der
hochgespannte Dampf des Eintrittsraumes O drückt,
derjenigen gleich ist, welche nur dem geringen Druck des Ausfluſsraumes Q ausgesetzt ist.
Die Zugstange H erfaſst den Hebel I nicht direct; in dem Auge des Hebels f liegt vielmehr der Drehzapfen eines Handhebels R. In der Verlängerung dieses Zapfens ist ein zweiter
excentrisch liegender Zapfen angebracht und dieser letztere wird von der Zugstange
direct erfaſst. In der aus der Figur ersichtlichen Lage ist der excentrische Zapfen
nach oben gekehrt. Wird der Handhebel jedoch um 180° gedreht, so daſs der Handgriff
nach der entgegengesetzten Seite zu liegen kommt, so muſs der excentrische Zapfen
abwärts zu stehen kommen. Mit dem nämlichen Hebel ist auſserdem die kreisförmige
Scheibe S verbunden, welche sich beim Umdrehen des
Hebels gegen einen ebenen Vorsprung s des Gehäuses B anlegt. Durch diese Vorrichtung wird nämlich das
Drosselventil in ein vollständig dichtes und nicht entlastetes Absperrventil
umgewandelt. Beim Hinüberschlagen des Handhebels legt sich die Scheibe S auf den ebenen Vorsprung s und drückt dadurch den Hebel F in seine
höchste Lage. Gleichzeitig wird der Hebel I in Folge
der Excentricität des Drehzapfens der Zugstange noch weiter als bis in diejenige
höchste Lage gehoben, die ihm vom Regulator ertheilt werden kann. In Folge dessen
wird auch der Schieber M über diejenige Endstellung
hinaus verschoben, die ihm der Regulator bei höchster Lage ertheilt. Dadurch werden
die beiden Einfluſskanäle k' an ihren hintern Enden
etwas abgedeckt, während die Ausfluſskanäle o immer
noch vollständig zugedeckt bleiben; im Schieberraum P
tritt deshalb der volle Dampfdruck ein und der Schieber wird fest gegen die
Dichtungsränder der Ausfluſskanäle o gepreſst, so daſs
eine selbstständige Dichtung erzielt wird. Durch Zurückschlagen des Handhebels wird
der als Absperrventil benutzte Schieber wieder geöffnet und der Einwirkung des
Regulators ausgesetzt.
Die Ausführung dieses Regulators hat H. Gruson in
Buckau-Magdeburg übernommen.
Tafeln