| Titel: | Verbesserte Corlisssteuerung der Fishkill Landing Machine Comp. zu Fishkill am Hudson, New-York. |
| Fundstelle: | Band 265, Jahrgang 1887, S. 205 |
| Download: | XML |
Verbesserte Corliſssteuerung der Fishkill Landing
Machine Comp. zu Fishkill am Hudson, New-York.
Mit Abbildungen auf Tafel
13.
Verbesserte Corliſssteuerung der Fishkill Landing Machine
Comp.
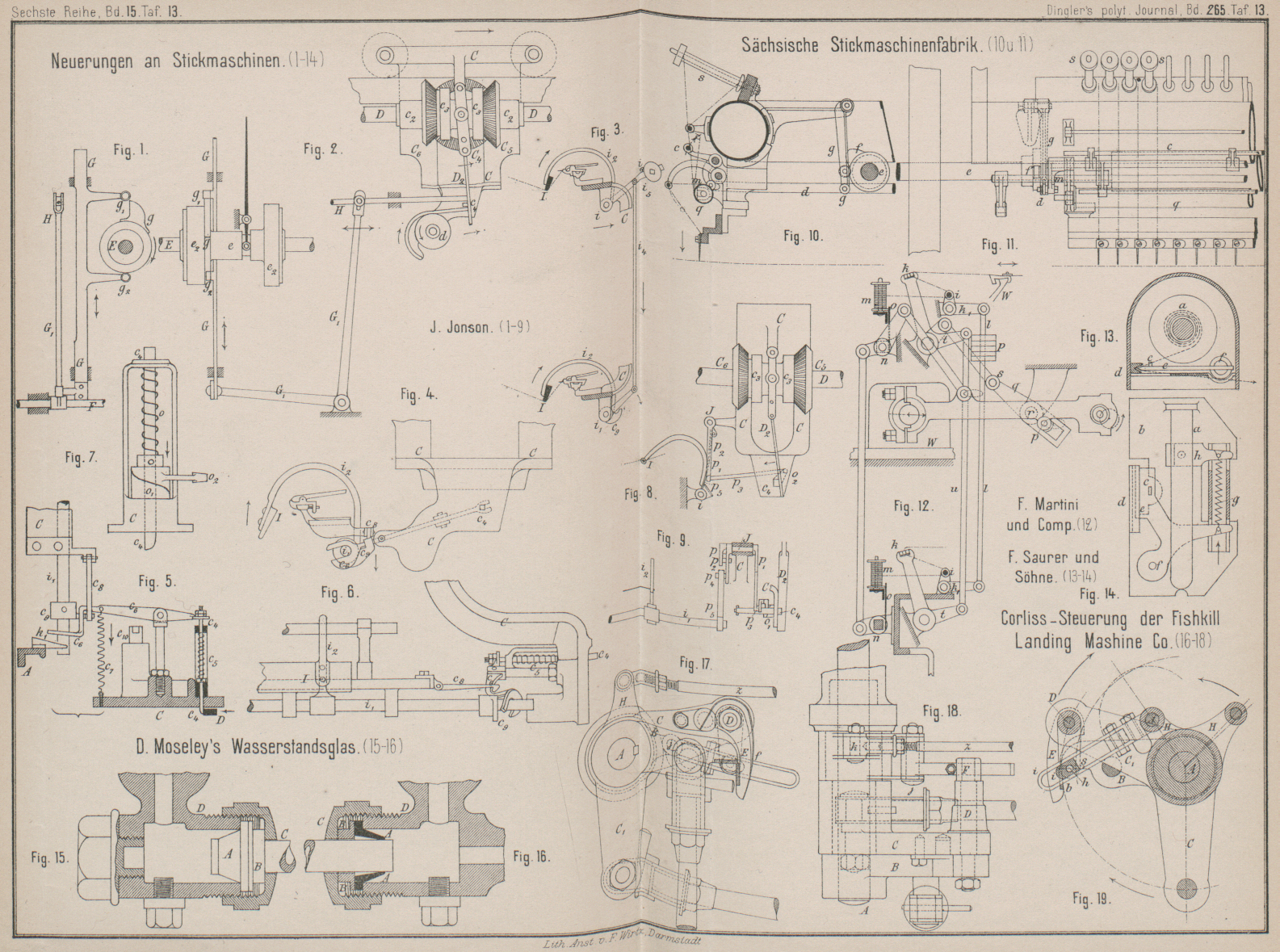
Diese Maschine zeigt im Allgemeinen das übliche Ansehen der Corliſsmaschinen; die
Steuerung erfolgt durch 4 Rundschieber, und zwar durch die oberen der Einlaſs, durch
die unteren der Auslaſs des Dampfes. Die Bewegung dieser 4 Schieber geht von einer
an der Seite des Cylinders gerade inmitten der Schieber gelagerten Steuerscheibe
aus, welche vom Excenter aus in Schwingung versetzt wird. Die Eigenthümlichkeit
dieser Maschine besteht in dem Bewegungmechanismus der Einlaſsschieber, welcher in
Fig. 17
und 18 in
Ansicht und Grundriſs dargestellt ist. In diesen Figuren bezeichnet A die Schieberspindel und B ist der auf dieser festgekeilte Arm, welcher die Drehung der Spindel
bewirkt. Unmittelbar hinter diesem Arme steckt ein Winkelhebel CC1 frei drehbar auf
einem Muffe, welcher die Spindel A umgibt. Der Arm C1 steht durch eine an
den Zapfen angeschlossene Zugstange mit der Steuerscheibe in Verbindung; der Zapfen
D des Armes C aber
trägt die Klinke E, die mit einer harten stählernen
Anschlagplatte ausgerüstet ist, mit welcher sie sich gegen die ebenfalls stählerne
und gehärtete Nase an dem Hebel B legt. (Beide
Stahlplatten sind durch Schraffirung ausgezeichnet.) Eine kleine Feder f drückt gegen die Klinke E und hält dieselbe mit der Nase an B in
sicherem Eingriffe.
Der Zapfen D ist nicht fest an dem Arme C, sondern in einer ziemlich langen Hülse desselben
frei drehbar; die Klinke E ist fest mit ihm verbunden.
An der anderen Seite sitzt auf ihm ein gegabelter Hebelarm F, auf dessen Zapfen h (vgl. Fig. 19, welche den
Mechanismus von der Rückseite zeigt) ein Gleitstück s
steckt, über welches sich der Schlitz der Schubstange i
hinwegschiebt, welche an den Arm j eines Winkelhebels
H angeschlossen ist, der lose auf einen runden
Vorsprung des Schiebergehäuses aufgesteckt ist, und durch die Zugstange z vom Regulator aus verstellt wird. Bewegt sich nun der
Winkelhebel CC1 (Kg.
19) in der Richtung der Pfeile, so gleitet bei der Hebung des Armes C1 das Gleitstück s in dem Schlitzrahmen F
mehr und mehr nach der Mitte zu, bis es endlich gegen das Ende des Schlitzes
anstöſst, worauf die Kniehebelwirkung von j auf s eine kleine Drehung des Zapfens D und damit das Auslösen der Klinke E von dem Hebel B bewirkt.
An diesem letzteren aber greift noch mittels einer senkrechten Zugstange eine
Gewichts- oder Federbelastung an, durch welche nun das augenblickliche Schlieſsen
des Schiebers hervorgebracht wird.
Die hier angewendete Auslösungsvorrichtung hat die Eigenthümlichkeit, daſs in Folge
der Kniehebelwirkung der Theile j und F bei der Auslösung der Klinke E fast gar keine Rückwirkung auf den Regulator stattfindet. Da nämlich der
Arm j fast genau in der Richtung des Schlitzrahmens F steht, so wird das auf ihn drehend einwirkende Moment
ein sehr kleines, und wird dasselbe in der Regel geringer sein, als das Moment der
Reibung der Hebelhülse auf dem dicken Zapfen des Gehäuses, worauf dieselbe steckt.
In diesem Falle findet also gar keine Rückwirkung auf den Regulator statt. Da aber
auch nur so lange, als der Auslösungsdruck wirksam ist, die starke Reibung der Hülse
auf ihrem Zapfen andauert, so kann im Uebrigen der Regulator mit Leichtigkeit auf
die Winkelhebel H einwirken, und die Steuerung wird
also in sehr empfindlicher Weise sich dem Kraftbedarfe der Maschine anpassen.
Tafeln