| Titel: | F. J. Rowan's Werkzeugmaschinen mit elektrischem Betrieb. |
| Autor: | Pregél |
| Fundstelle: | Band 267, Jahrgang 1888, S. 582 |
| Download: | XML |
F. J. Rowan's Werkzeugmaschinen mit elektrischem
Betrieb.
Mit Abbildungen auf Tafel
29.
Rowan's Werkzeugmaschinen mit elektrischem Betrieb.
Beachtenswerth sind die Versuche F. J. Rowan's, gewisse
Werkzeugmaschinen mit elektrischer Kraft zu treiben (vgl. 1867 265 332). Es wäre viel erreicht, wenn es möglich würde, für einzelne
Arbeitsmaschinen, wie Bohr-, Niet- und Stemmmaschinen beim Schiffsbau, den durch die
räumliche Ausdehnung des Gegenstandes bedingten Mangel an Wiederhalt bezieh.
Angriffspunkten für die Befestigung des Werkzeuges in einfacher Weise zu umgehen.
Beim mechanischen Bohrbetrieb an Ort und Stelle an der Schiffswand bietet die
Anbringung der Bohrmaschine (vgl. Berrier-Fontaine 1887
264 * 543. 266 282) schon
aus dem Grunde weniger Schwierigkeiten, weil der Bohrdruck nicht zu groſs und offene
Löcher für das Durchziehen von Spannschrauben mehr oder weniger stets vorhanden
sind. Anders und weit umständlicher gestaltet sich das Nieten mittels Kraftbetrieb,
mögen Druckwasser- oder Preſsluft-Nietmaschinen (vgl. 1887 265 * 492. 266 * 259) hierbei angewendet
werden. F. J. Rowan befestigt nach Scientific American vom 3. September 1887 mittels zwei
oder vier Elektromagneten den Maschinenrahmen an beliebiger Stelle der Auſsenwand
des Schiffskörpers, verlegt denselben nach bewirktem Stromschluſs an ein anderes
Arbeitsfeld und betreibt schlieſslich das Werkzeug durch eine kleine Dynamomaschine,
wodurch die hindernden Rohrleitungen für das Druckwasser ganz in Wegfall kommen.
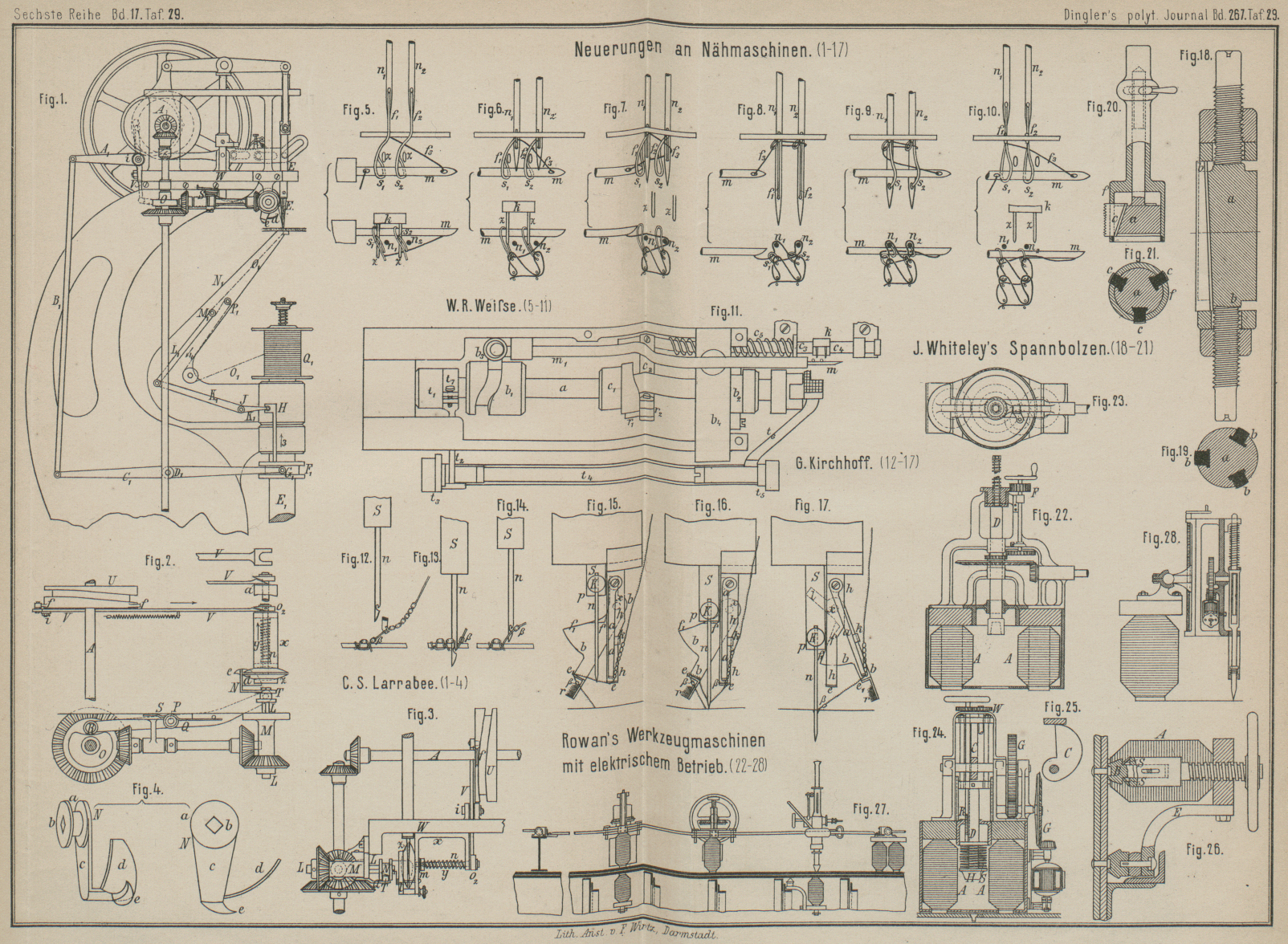
So wurde wiederholt versuchsweise beim Bau des Dampfschiffes Pukaki eine Bohrmaschine (Fig. 22 und 23 Taf. 29)
verwendet, die mit einer elektrischen Triebkraft von ¾ in 1¾ Minuten und in
volles Eisen ein Loch von 25mm Durchmesser bei
37mm Tiefe bohrt, wobei ein Theil dieser Kraft
noch zur Bethätigung der Ankermagnete A gebraucht wird.
Durch die Schalt- und Mutterräder F wird mittels der
Spindelhülse die Bohrspindel D gesteuert, während bei
Gewindeschneidmaschinen dieselbe eine freie Beweglichkeit in der Achsrichtung
erhält, wodurch sowohl die obere Spindelhülse als auch die Steuerräder in Wegfall
kommen.
Mit einer vielfachen Bohrmaschine (vgl. 1887 264 * 431),
welche durch eine Immisch-Dynamo betrieben ist, wird
mittels 0,6 elektrischer Triebkraft in 1¾ Minuten und in volles Eisenblech
ein Loch von 17mm Durchmesser bei 20mm Tiefe gebohrt. Der Bohrmaschinenrahmen wird
durch die elektromagnetische Kraft von vier Ankern an die Schiffswand angehalten,
die darauf stellbaren Bohrvorrichtungen von einer gemeinschaftlichen Welle mittels
Schraubenräder betrieben und durch eine Schneckenwelle gesteuert. Ein Stirnräderpaar
stellt die Verbindung mit der elektrischen Kraftmaschine her.
Beim mechanischen Nieten ist die eigentliche Nietmaschine am Auſsenbord, der selbständige
Gegenhalter an der Innenwand des Schiffsbelages derart angestellt, daſs die
Ankerpole der Elektromagnete wechselseitig gerade gegenüberstehen, was eine
Verstärkung der Anziehung hervorbringen soll; trotzdem dürften hierbei bloſs
Nietmaschinen mit Hammerwirkung zu verwenden sein.
Eine solche Nietmaschine ist in Fig. 24 Taf. 29
dargestellt, welche mittels ½ in einer Minute 100 bis 150 Schläge ausführt,
so daſs annähernd 14 bis 20mk Effect auf einen
Schlag entfällt, eine Wirkung, welche jene eines 3k schweren Handhammers übertrifft und mit der man im Stande ist, 6 Nieten
in einer Minute zu schlieſsen. Vermöge der Ankermagnete AA haftet das Nietmaschinengestell an der Auſsenwand des Schiffsbleches.
Der an der Führungsstange angebrachte Nietstempel H
wird durch eine kräftige Spiralfeder S niedergetrieben
und durch den kreisenden Daumen C (Fig. 25) gehoben, während
der Hub durch die stellbare Druckscheibe D mittels
zweier durch Räder W verbundenen Stellspindeln R geregelt wird. Zwei übersetzende Räderpaare GG verbinden die Hammerwelle mit der elektrischen
Kraftmaschine.
Der Gegenhalter dieser Nietmaschine (Fig. 26 Taf. 29) besteht
aus einem Querstück, an welchem die Anker angesetzt sind und durch welches die
Stellspindel geht. Zwischen Setzstock B und
Stellspindel ist noch eine Bufferfeder S eingeschaltet.
Ein Arm E gibt dem Ganzen besseren Halt.
Der Schiffbauer William Denny hat nach dem Vorgange von
John McMillan in Dumbarton (seit 1876) die
sämmtlichen, nunmehr mit Elektricität betriebenen Arbeitsmaschinen, Niethämmer-,
Stemm- und Bohrmaschinen (Fig. 27 Taf. 29) auf
Führungen angeordnet, welche in gewissem Abstande parallel zur Schiffswand befestigt
sind. In Fig.
28 Taf. 29 ist eine Stemmmaschine dargestellt, welche ähnliche
Einrichtungen, wie die vorbeschriebene Nietmaschine, zeigt.
Pregél.
Tafeln