| Titel: | Neuerungen an Elektromotoren (Dynamomaschinen). |
| Fundstelle: | Band 273, Jahrgang 1889, S. 289 |
| Download: | XML |
Neuerungen an Elektromotoren
(Dynamomaschinen).
(Patentklasse 21. Fortsetzung des Berichtes Bd.
272 S. 163.Vgl. auch Immisch 1889 273 * 126; Kapp 1889 273 * 128; Sandwell 1889
273 27.)
Mit Abbildungen im Texte und auf Tafel 14.
Neuerungen an Elektromotoren (Dynamomaschinen).
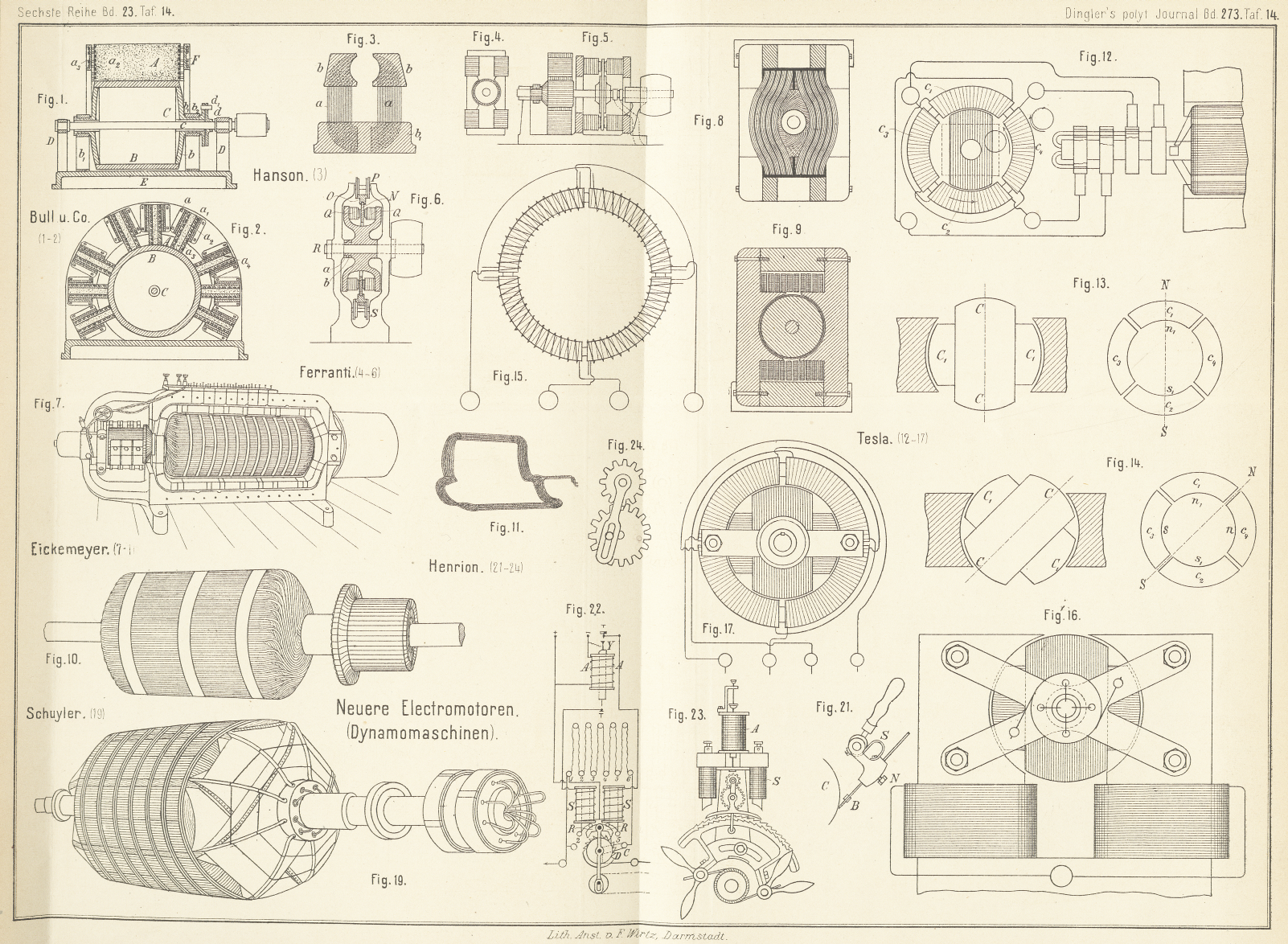
1) H. C. Bull und Comp. und Henry Clay Bull in London ordnen nach ihrem Englischen Patente Nr. 10200
vom 21. Juli 1887 die Feldmagnete A, wie die beiden
Schnitte Fig.
1 und 2 sehen lassen, in drei Gruppen, jede zu
drei Magneten, um den Umfang eines sich drehenden eisernen oder stählernen Cylinders
B an, welcher mit irgend welcher Bewickelung nicht
versehen ist und mit seinen Endzapfen in den gegen die Grundplatte E isolirten Lagern b ruht.
Die frei durch den Cylinder B gehende Welle C der Maschine (Dynamo, oder Motor) liegt in den Lagern
D und trägt an einer Seite die Scheibe d, welche mit einem Stifte d1 von nicht leitendem Material versehen
ist, der in eine Scheibe b2 greift, die mit dem Lagerhalse des einen Deckels b des Cylinders B aus einem Stücke gegossen
ist. Auf diese Weise ist B vollständig isolirt. Jeder
einzelne Magnet A ist eigenthümlich gebildet; er
besteht aus einem metallischen Kerne a1 und daneben aus nicht leitendem Material a2; darum ist eine
Spule a3 von Draht mit
zur Achse C parallel laufenden Windungen gewickelt.
Auſserhalb dieser Spule, und zwar auf der Seite des nichtleitenden Materials, ist
die zweite metallische Hälfte a4 des Kernes angebracht. Von links nach rechts hin
kommt also zuerst Metall, dann die eine Seite der Windungen, dann das isolirende
Material, dann wieder Metall und endlich die zweite Seite der Windungen. Die Theile
des Kernes werden durch Klammern a, von denen sie
isolirt sind, getragen und mittels derselben an den Seitenständern F befestigt, welche auf der Grundplatte E festgemacht sind. Der Kern a1 ist auf der Auſsenseite mit Nuthen zur
Aufnahme der Spule a3
versehen. Der ganze erzeugte bezieh. verbrauchte Strom geht durch die Spule. Ebenso
ist auch der äuſsere metallene Theil a4 des Magnetes mit Nuthen versehen, damit er über
die Wickelung a3 paſst.
Die inneren, wirksamen Flächen der Magnete A sind
ausgebohrt, so daſs die Auſsenfläche des Cylinders B
sich ganz nahe an ihnen bewegt, ohne sie zu berühren. Durch diese Anordnung der
Magnete sind die elektrischen Kraftlinien gezwungen, sich nur in einer Richtung zu
bewegen, so daſs dadurch gleichzeitig der Commutator an der Dynamo bezieh. dem Motor
erspart wird.
Da der Cylinder B ohne Wickelung ist, so kann derselbe
sehr rasch gedreht werden, und hat dabei in den Spulen Strom zu erzeugen.
2) L. Hanson in Halifax stellt die Schenkel a der Elektromagnete (Fig. 3) aus weichen
Eisendrähten her; die Enden derselben werden in geeignete Formen eingelegt und
diese hierauf mit flüssigem Eisen ausgegossen, welches, die Drähte innig verbindend,
die Polstücke b bezieh. den Bug oder das Joch b1 bildet. In b1 brauchen die Drähte
der beiden Schenkel nicht getrennt zu sein. (Englisches Patent Nr. 10240 vom 22.
Juli 1887; Zusatz zu Nr. 15230 vom Jahre 1886.)
3) S. Z. de Ferranti in London erhielt das Englische
Patent Nr. 12418 vom 13. September 1887 auf Verbesserungen in der Fortleitung des
elektrischen Stromes und der Verwendung desselben als bewegende Kraft.
Die Verbesserung in den Leitungen besteht darin, daſs er einen elektrischen Leiter
bezieh. ein Kabel mittels Lederriemen an Drähten aufhängt, deren jeder mit seinen
beiden Enden an zwei Isolatoren befestigt ist, die auf zwei benachbarten Stangen
angebracht sind. Jeder Lederriemen wird um das Kabel herum gelegt und sein Ende wird
durch einen über dem Kabel im Riemen angebrachten Schlitz gesteckt.
Bei der Verwendung von Wechselströmen als Betriebskraft führt Ferranti nach Fig. 4 und 5 die Wechselströme durch
einen aus zwei Elektromotoren gebildeten Apparat. Der Hauptmotor hat keinen
Commutator und ist so eingerichtet, daſs, wenn er mit geeigneter Geschwindigkeit
umläuft, diese Geschwindigkeit immer aufrecht erhält und sich mit den Wechseln des
durch ihn gehenden Stromes in Uebereinstimmung hält. Der zweite Motor ist viel
kleiner, mit Commutator versehen und kann sich sofort in Thätigkeit setzen, sobald
der Strom durch ihn hindurchgeht. Sein Anker ist entweder mit dem des ersten Motors
durch Räder gekuppelt, oder beide sitzen auf derselben Welle, so daſs, wenn
anfänglich der Stromkreis geschlossen wird, der kleine Motor zunächst den Hauptmotor
treibt und ihn in diejenige Geschwindigkeit versetzt, bei welcher er in
Uebereinstimmung mit dem ihm aus der Leitung gelieferten Strome arbeitet.
Der in Fig. 6
skizzirte Motor hat ebenfalls keinen Commutator und ersetzt für den gedachten Zweck
die beiden in Fig.
4 und 5 dargestellten Motoren. Der ringförmige Anker N ist innerhalb eines Ringes O angebracht,
welcher zwischen Rollen P ruht, die mit Flanschen
versehen und an seinem Umfange in angemessenen Abständen vertheilt sind. Der Anker
bewegt sich zwischen zwei im Kreise angeordneten Reihen von Elektromagneten Q, Q, welche abwechselnd Nord- und Südpol haben und von
der zum Ringe O concentrischen Welle R getragen werden. In seiner drehenden Bewegung kann
der Anker mittels eines Bremsbackens S angehalten
werden. Um die Maschine in Gang zu setzen, werden die Wechselströme mit Hilfe der
Drähte a und b in den
Anker geleitet, während der Anker gleichzeitig mit der Hand in Umdrehung gesetzt
wird; diese Bewegung wird durch den Strom unterstützt, und die Magnete mit ihrer
Welle bleiben hierbei in Ruhe. Wird nun die Bremse S
allmählich gegen den Ring O gepreſst, so wird auch der
Anker allmählich zur Ruhe gelangen, wobei aber die Magnete mit ihrer Welle allmählich in
Bewegung kommen; ihre Geschwindigkeit nimmt in dem Maſse zu, wie die des Ankers
abnimmt, und wächst so lange, bis dieser zur Ruhe gekommen ist, wobei dann die Welle
diejenige Geschwindigkeit besitzt, welche der Strom selbst ihr ertheilt. Die hierbei
der Welle ertheilte motorische Kraft kann durch Riemenübertragung o. dgl. nutzbar
gemacht werden.
4) Eine Dynamomaschine ohne Magnetkern ist von Uppenborn
und später von Prof. Forbes angeregt (vgl. Centralblatt für Elektrotechnik, Bd. 8 S. 794: Bd. 9 S.
305) und von R. Eickemeyer in New York zuerst
ausgeführt worden. Fig. 7 ist eine Längenansicht nach Fortnahme der einen Eisendecke, Fig. 8 und 9 sind
Querschnitte derselben. Der Anker liegt innerhalb der Magnetisirungsspulen, die
durch die Seitentheile oder den Mantel zusammen gehalten werden, welcher den Anker
möglichst dicht umschlieſst und nur die eisernen Verbindungsstücke der Magnetkerne
anderer Maschinen ersetzt. Die Vortheile dieser Anordnung sind folgende. Die
Magnetisirung des Ankers erfolgt unmittelbar durch die umgebenden Drahtwindungen;
die Kraftlinien nehmen daher ihren Anfang im Eisenkerne des Ankers, und es wird in
Folge dessen nahezu der ganze Magnetismus, bis auf einen ganz geringen, kaum
nachweisbaren Theil, nutzbar gemacht. Wird der Eisenumhüllung überall genügender
Querschnitt gegeben, so können in der Auſsenseite keine Kraftlinien auftreten, und
überdies würden sie, wenn sie überhaupt auftreten würden, nicht als eigentlicher
Verlust an Magnetismus betrachtet werden können, da sie den Eisenkern des Ankers
bereits durchlaufen haben.
Der Anker Fig.
10 ähnelt in seiner Wickelung dem schon früher von R. Alioth und Comp. in Basel (* D. R. P. Kl. 21 Nr. 34783 vom 17. März
1885; vgl. 1887 265 * 436) benutzten. Bei der in Fig. 7
abgebildeten Maschine hat der Anker 44 Abtheilungen, jede mit vier Windungen; die
Abtheilungen haben die in Fig. 11 dargestellte Form
und werden auf entsprechenden Holzrahmen vorher gewickelt, alsdann mit
Schellackfirniſs gut getränkt und nachdem sie getrocknet sind, mit Seidenband
zusammen gehalten, worauf sie nach nochmaligem Firnissen und Trocknen auf dem
cylindrischen Ankerkern befestigt und durch Bänder zusammengehalten werden. Durch
diese Anordnung wird der Anker in allen Abtheilungen vollkommen gleichwerthig, alle
Windungen jeder Abtheilung und die Abtheilungen selbst sind parallel, und da sie
sich auf den Stirnflächen des Ankerkernes nicht über einander legen, so wird weniger
Raum beansprucht, auch ist die Gefahr des Durchschlagens geringer als bei anderen
Wickelungsmethoden; endlich ist auch die Herstellung der Wickelung einfach. – Nach
angestellten Versuchen ist die Materialausnutzung bei dieser Maschine sehr günstig;
auch soll die Maschine nur sehr geringe Funkenbildung zeigen. (Centralblatt für Elektrotechnik, 1888 * S. 477; vgl.
auch * S. 681.)
5) Nicola Tesla hat in einem vor einiger Zeit in dem
American Institute of Electrical Engineers (vgl. Transactions of the Institute, Bd. 5 * S. 308 und 325) gehaltenen Vortrage
einen neuen Motor angegeben, welcher mit Wechselströmen arbeitet und auf der
elektrodynamischen Wirkung beruht, welche zwei mit ihren Achsen rechtwinklig zu
einander gestellte, von Wechselströmen durchlaufene Spulen auf das magnetische Feld
ausüben. Mittels solcher Motoren will Tesla die
Wechselströme zur Vertheilung von Elektricität und zur Kraftübertragung nutzbar machen.
In den Dynamomaschinen werden Wechselströme erzeugt und mit Hilfe des Commutators,
der eine wesentliche Veranlassung für häufige Betriebsstörung ist, in Gleichstrom
umgewandelt. Dieser Gleichstrom kann nicht unmittelbar im Motor Verwendung finden,
sondern er muſs wieder mit Hilfe eines ähnlichen Mittels in seinen ursprünglichen
Wechselstrom-Zustand zurückgeführt werden. Die Thätigkeit des Commutators ist daher
nur eine rein äuſserliche, die innere Arbeit der Maschine in keiner Weise
beeinflussende, und während hiernach alle Maschinen thatsächlich
Wechselstrommaschinen sind, erscheint der Gleichstrom nur im äuſseren Stromkreise,
auf seinem Wege vom Stromerzeuger zum Motor. In Hinblick auf diese Thatsache
empfehlen sich die Wechselströme als eine mehr unmittelbare Anwendung der
elektrischen Arbeitskraft, während die Anwendung von Gleichstrom nur dann
gerechtfertigt erscheinen würde, wenn die Dynamomaschine denselben unmittelbar
erzeugt, und wenn der Motor unmittelbar durch ihn betrieben werden könnte.
Die Thätigkeit des Commutators an einem Motor beschränkt sich aber nicht bloſs auf
die soeben besprochene Umkehrung der Ströme, sondern er veranlaſst auch eine
selbsthätige, fortschreitende Verschiebung der Pole in dem einen der magnetischen
Glieder des Motors. Könnte man also die Umwandlung der Wechselströme des
Stromerzeugers und ebenso die Rückverwandelung des Gleichstromes im Motor umgehen,
so würde, um eine Drehung des Motors zu veranlassen, noch immer die fortschreitende
Verschiebung der Pole eines seiner magnetischen Glieder nothwendig sein.
Um diesen Zweck durch die unmittelbare Wirkung der Wechselströme zu erreichen,
verwendete Tesla bei seinen ersten Versuchen einen
Trommelanker, der mit zwei rechtwinklig zu einander liegenden Spulen (CC und C1
C1
) versehen war, deren Enden in der gewöhnlichen Weise
mit zwei Paaren isolirter Contactringe verbunden wurden. Ein aus dünnen, gegen
einander isolirten Eisenblechen hergestellter Ring wurde ferner mit vier Spulen c1, c2, c3 und c4 bewickelt, von denen
je zwei einander gegenüberstehende so mit einander verbunden wurden, daſs sie freie
Pole an einander gerade entgegengesetzten Stellen des Ringes erzeugten. Die übrig
bleibenden freien Enden der Spulen wurden mit den Contactringen des Ankers im Stromerzeuger
verbunden, so daſs zwei unabhängige Stromkreise entstanden, wie in Fig. 12 angedeutet
ist.
Da das magnetische Feld des Erzeugers unabhängig erregt wird, so erregt die Umdrehung
des Ankers in den Spulen CC Ströme, die in bekannter
Weise in Stärke und Richtung wechseln. Während bei der in Fig. 13 abgebildeten
Stellung der Strom in den Spulen CC Null ist, besitzt
der in den Spulen C1
C1 seine gröſste
Stärke, die Verbindungen aber sind so gewählt, daſs der Ring durch die Wirkung der
Spulen C1
C1 so magnetisirt wird,
wie es die Buchstaben N und S in Fig.
13 andeuten; die magnetisirende Wirkung der Spulen c1, c2 ist gleich Null, da diese Rollen in dem
Stromkreise der Spule C liegen.
Ist die Drehung der Ankerspulen um ⅛ Umdrehung in der Pfeilrichtung weiter
fortgeschritten (Fig. 14), so erzeugt die Spule C1 einen Strom von der nämlichen Richtung, jedoch
schwächer wie vorher, welcher die Pole n1, s1 auf dem Ringe hervorruft; die Spule C dagegen gibt ebenfalls einen Strom von derselben
Richtung und erregt die Pole n, s auf dem Ringe;
hieraus ergibt sich dann für letzteren die Polarität NS, welche um ⅛ Umdrehung in der Pfeilrichtung gegen die in Fig. 13
vorhandene Lage NS vorgeschritten ist.
Bei vollendeter Vierteldrehung des Ankers hat die Spule C ihren stärksten Strom, C1 dagegen befindet sich in ihrer neutralen Stellung
und ist stromlos; die Polarität NS des Ringes stimmt
daher jetzt mit ns in Fig. 14 überein, ist also
nunmehr ebenfalls um ¼ Umdrehung gegen Fig. 13 fortgeschritten.
Bei vollendeter Halbdrehung des Ankers ist der Strom in C Null, dagegen in C1 am stärksten; die Polarität des Ringes rührt von
C1 allein her und
ist jetzt gerade entgegengesetzt zu Fig. 13.
Bei der folgenden halben Umdrehung des Ankers wiederholen sich dieselben
Erscheinungen wie vorher, jedoch unter entgegengesetzter Lage der Pole S und N.
Während einer ganzen Umdrehung des Ankers durchlaufen also die Pole des Ringes den
ganzen Kreisumfang, und da jede Umdrehung das nämliche Spiel erzeugt, so entsteht
ein schneller Wirbel der Pole. Werden die Verbindungen bei einem der Stromkreise des
Ringes umgekehrt, so drehen sich seine Pole im entgegengesetzten Sinne.
Diese Drehung der Pole läſst sich auf verschiedene Arten beweisen. Wird z.B. eine,
auf einem Zapfen leicht drehbare Stahlscheibe in die Nähe des Ringes gebracht, so
wird dieselbe in schnelle Umdrehung versetzt, deren Richtung mit der Stellung der
Scheibe wechselt, und zwar ist, falls die Scheibe sich innerhalb des Ringes
befindet, ihre Umdrehungsrichtung entgegengesetzt zu der, welche sie auſserhalb des
Ringes annimmt (vgl. Fig. 12); dagegen bleibt
sie in Ruhe, sobald sie in eine, zum Ringe symmetrische Stellung gebracht wird.
Diese Erscheinungen erklären sich durch folgendes: Sobald sich ein Pol nähert, erzeugt er in dem
nächstgelegenen Punkte der Scheibe einen entgegengesetzten Pol, so daſs dieser Punkt
der Scheibe angezogen wird. Da sich nun der Pol des Ringes von der Scheibe entfernt,
so wird eine tangentiale Wirkung auf dieselbe ausgeübt, die sich fortwährend
wiederholt, so daſs eine Drehung der Scheibe eintritt. Ist aber die Scheibe
symmetrisch zum Ringe angeordnet, so sind solche Tangentialkräfte auf beiden Seiten
der Scheiben thätig und heben sich auf, so daſs dieselbe in Ruhe verbleibt. Die
Wirkung wird durch die magnetische Trägheit der Scheibe bedingt, daher ist eine
Scheibe aus gehärtetem Stahle vorzuziehen. Mit einer solchen Scheibe kann man allen
Unregelmäſsigkeiten in der Wirkung nachspüren. Hält man Eisenfeilspäne auf einem
Papiere auſsen nahe an den Ring, so gerathen sie in schwingende Bewegung und bleiben
an der Stelle, wenngleich man das Papier vor und zurück bewegt; hebt man das Papier
in eine gewisse Höhe, so werden sie weggeworfen, stets in einer der Drehung der Pole
entgegengesetzten Richtung. Legt man das Papier flach auf den Ring und gibt
plötzlich Strom, so sieht man den magnetischen Wirbel ganz leicht.
Die Drehung der Pole erzeugt natürlich entsprechende Inductionswirkungen und kann zur
Erzeugung von Strömen in einem geschlossenen Leiter nutzbar gemacht werden, welcher
sich innerhalb des Wirkungskreises der Pole befindet. Hierzu ist es zweckmäſsig, den
Ring mit zwei über einander gelegten Spulen zu bewickeln, von denen die eine den
primären, die andere den secundären Stromkreis bildet, wie in Fig. 15 angedeutet ist.
Der magnetische Kreis muſs, um die beste ökonomische Wirkung zu erzielen,
geschlossen sein.
Die auf die secundären Spulen ausgeübte Inductionswirkung wird hauptsächlich eine
Folge der Verschiebung oder Bewegung der magnetischen Thätigkeit sein; doch werden
in den Stromkreisen auch Ströme in Folge der Veränderung in der Stärke der Pole
erzeugt werden. Letztere Wirkung kann jedoch durch geeignete Anordnung des
Stromerzeugers und durch geeignete Bestimmung der magnetisirenden Wirkung der
primären Spulen beseitigt werden. Wird die Stärke der Pole unveränderlich erhalten,
so wird die Wirkung des Apparates eine vollkommene sein, und es wird sich damit
dasselbe leisten lassen, als wenn die Polverschiebung mit Hilfe eines Commutators
mit unendlich vielen Abtheilungen oder Streifen bewirkt wurde.
Die Anwendung dieser Grundsätze hat zum Baue zweier Grundformen von Motoren geführt.
Die eine derselben hat eine verhältniſsmäſsig geringe Drehwirkung bei der
Ingangsetzung, arbeitet aber mit vollkommen gleichbleibender Geschwindigkeit bei
allen Belastungen und wird „synchron“ genannt. Die zweite Gattung hat eine
starke Drehkraft beim Angehen und ist in ihrer Geschwindigkeit abhängig von der
Belastung. Diese Motoren können auf drei verschiedene Weisen betrieben werden: 1) durch die
Wechselströme der Quelle allein, 2) durch die vereinigte Wirkung dieser Ströme und
inducirter Ströme, 3) durch vereinigte Wirkung von Wechselströmen und
Gleichstrom.
Die einfachste Form des synchronen Motors ist in Fig. 12 dargestellt und
besteht in einem, aus dünnen Platten hergestellten, mit polartigen Hervorragungen
versehenen Ring, der mit vier in der vorher beschriebenen Art verbundenen Spulen
bewickelt ist. Eine eiserne, runde Scheibe, von der auf zwei gegenüberstehenden
Seiten ein Stück weggeschnitten ist, dient als Anker; sie kann sich innerhalb des
Ringes möglichst dicht an dessen Polen drehen. Diese Scheibe wird in Folge des
Bestrebens, sich immer in die Stellung zu bringen, in welcher sie die gröſste Zahl
der Kraftlinien fassen kann, der fortwährend sich verschiebenden Polarität
unmittelbar folgen und wird dabei synchron mit dem Anker des Stromerzeugers bleiben.
In der Anordnung nach Fig. 12 gibt der Anker
bei jeder Umdrehung zwei Stromwechsel in jedem Stromkreise. Würde der Anker bei
jeder Umdrehung eine gröſsere Zahl von Strömen liefern, so würde die Geschwindigkeit
des Motors entsprechend zunehmen. Da die auf die Scheibe ausgeübte Anziehung dann am
gröſsten ist, wenn sich die Scheibe in nächster Nähe der Pole befindet, so wird ein
solcher Motor bei allen Belastungen innerhalb der Grenzen seiner Leistungsfähigkeit
immer dieselbe Geschwindigkeit beibehalten.
Um das Angehen des Motors zu erleichtern, kann die Scheibe mit einer in sich selbst
geschlossenen Spule versehen werden. Die in der Spule beim Anlassen erzeugten Ströme
erregen zunächst die Scheibe sehr kräftig, so daſs die vom Ringe auf sie ausgeübte
Anziehung verstärkt wird, und da in dieser Spule so lange Ströme erregt werden, als
die Geschwindigkeit des Ankers noch geringer ist als die der Pole, so kann ein
solcher Motor eine beträchtliche Leistung geben, auch wenn die Geschwindigkeit unter
der normalen ist. Da die Polstärke sich nicht ändert, so werden in der Spule keine
Ströme mehr erzeugt, wenn der Motor mit normaler Geschwindigkeit läuft.
Anstatt die Spule in sich selbst zu schlieſsen, können ihre Enden auch mit zwei
isolirten Schleifringen verbunden werden, denen ein Gleichstrom von einem passenden
Erzeuger zugeführt wird. Die zweckmäſsigste Art, einen solchen Motor anzulassen,
besteht darin, daſs man zunächst die Spule in sich schlieſst, und zwar so lange, bis
die normale Geschwindigkeit ganz oder nahezu ganz erreicht ist, worauf der
Gleichstrom zugeführt wird. Die Scheibe darf, wenn der Motor überhaupt angehen soll,
durch den Gleichstrom nur so weit erregt werden, daſs die magnetisirende Wirkung des
Ringes noch überwiegt. Die Drehung eines solchen Motors kann nicht durch Umkehrung
des durch die Spule gesendeten Gleichstromes umgekehrt werden.
Der Synchronismus solcher Motoren kann am besten durch folgenden Versuch bewiesen werden. Bei
einem Motor mit feststehendem Feldmagnete, zwischen welchen sich der Anker dreht,
wie in Fig.
16, wird durch die Verschiebung der Pole des Ankers eine Drehung des
letzteren im entgegengesetzten Sinne hervorgebracht; hieraus folgt, daſs, wenn die
normale Geschwindigkeit erreicht ist, die Ankerpole eine feste Stellung gegen den
Feldmagnet einnehmen werden, wobei letzterer durch Induction magnetisirt wird, mit
einem bestimmten Pole an jedem Polstücke. Wird dem Feldmagnete beim Angehen des
Motors ein Stück weichen Eisens genähert, so wird es in Folge der Umkehrungen in der
Polarität des Magnetes mit schneller, schwingender Bewegung angezogen, die
Schwingungen werden aber mit zunehmender Geschwindigkeit des Motors allmählich
seltener, bis sie zuletzt ganz aufhören. Dann wird das Eisen zwar schwach, aber
gleichmäſsig angezogen, und beweist, daſs der Synchronismus erreicht und der Magnet
durch Induction erregt ist. – Ebenso wird sich die Scheibe, wenn sie dicht an den
Anker gehalten wird, so lange drehen, als die Geschwindigkeit der Drehung der Pole
diejenige des Ankers übersteigt; ist aber die normale Geschwindigkeit erreicht, so
steht die Scheibe still, weil sie dauernd angezogen wird.
In synchronen Motoren ist es wünschenswerth, die Menge des verschiebenden Magnetismus
unveränderlich zu erhalten, besonders wenn die Magnete nicht mit entsprechenden
Unterabtheilungen versehen sind. Um eine Drehwirkung in diesen Motoren zu erlangen,
muſste die Anordnung so getroffen werden, daſs, während die Pole des einen Gliedes
des Motors durch die Wechselströme der Quelle verschoben werden, die auf dem anderen
Gliede desselben erzeugten Pole stets in demselben Verhältnisse zu den ersteren
verbleiben, ohne Rücksicht auf die Geschwindigkeit des Motors.
Dies ist der Fall bei einem Gleichstrommotor; bei einem synchronen Motor, wie der
beschriebene, ist diese Bedingung dagegen nur erfüllt, wenn die Geschwindigkeit die
normale ist.
Der Zweck ist durch Anbringung eines entsprechend abgetheilten cylindrischen
Eisenkernes innerhalb des Ringes erreicht worden, der mit mehreren in sich selbst
geschlossenen Spulen bewickelt ist. Obwohl zwei rechtwinklig zu einander gestellte
Spulen wie in Fig.
17 genügen, ist es doch vortheilhafter, mehrere anzuwenden. In Folge
dieser Anordnung werden, sobald die Pole des Ringes verschoben werden, in den
geschlossenen Ankerspulen Ströme erzeugt, die an oder nahe bei den Punkten der
gröſsten Dichte der Kraftlinien am stärksten sind und Pole auf dem Anker erzeugen,
die – wenigstens theoretisch – rechtwinklig zu denen des Ringes liegen. Da nun diese
Wirkung, so weit die Stellung der Pole in Betracht kommt, vollständig unabhängig von
der Geschwindigkeit ist, so wird ein beständiger Antrieb auf den Umfang des Ankers
ausgeübt. In mancher Beziehung ähneln diese Motoren den Gleichstrommotoren. Wird die
Belastung vermehrt, so vermindert sich die Geschwindigkeit und auch der Widerstand
des Motors und es geht mehr Strom durch die erregenden Spulen, wodurch der Trieb
vergröſsert wird. Wird die Belastung weggenommen, so wächst die elektromotorische
Gegenkraft und es geht weniger Strom durch die primären oder erregenden Spulen. Ohne
jede Ladung ist die Geschwindigkeit derjenigen der verschiebenden Pole des
Feldmagnetes nahezu gleich.
Eine besonders bezeichnende Eigenschaft derartiger Motoren ist die Leichtigkeit, mit
welcher ihre Bewegung umgekehrt werden kann. Es ist dies eine Folge ihrer
eigenthümlichen Wirkung. Angenommen, der Anker sei in Bewegung und es werde die
Drehungsrichtung der Pole umgekehrt: Der Apparat stellt alsdann eine Dynamo dar, in
welcher die zu ihrem Betriebe nöthige Kraft das im Anker aufgespeicherte Moment ist
und deren Geschwindigkeit die Summe der Geschwindigkeit des Ankers und der der Pole
darstellt.
Da nun die Kraft zur Bewegung einer solchen Dynamo nahezu proportional der dritten
Potenz der Geschwindigkeit sein würde, würde schon aus diesem Grunde die
Ankerbewegung schnell umkehren. Aber gleichzeitig mit der Umkehrung tritt noch ein
anderes Element in Thätigkeit; sobald nämlich die Bewegungsrichtung der Pole gegen
die des Ankers umgekehrt wird, wirkt der Motor als ein Stromumsetzer
(Transformator), in welchem der Widerstand des secundären Stromkreises ganz
auſserordentlich vermindert wird durch Erzeugung einer zusätzlichen
elektromotorischen Kraft in diesem Stromkreise. Die Umkehrung erfolgt aus diesem
Grunde augenblicklich.
Will man unveränderliche Geschwindigkeit und zugleich eine gewisse Drehwirkung beim
Angehen sichern, so erreicht man dies unter anderem dadurch, daſs man zwei Anker,
einen für Drehung und den anderen für Synchronismus, auf derselben Achse befestigt
und dem einen oder dem anderen das Uebergewicht gibt. Oder es kann ein Anker für
Dreh Wirkung bewickelt, ihm aber eine gröſsere oder kleinere Neigung zum
Synchronismus durch die besondere Einrichtung des Eisenkernes gegeben werden.
Die erforderlichen Stromphasen in den beiden Stromkreisen kann man – allerdings
umständlicher – auch anders als durch zwei rechtwinklig zu einander gestellte Spulen
erlangen. Jede der gegenwärtig gebräuchlichen Dynamo kann leicht für diesen Zweck
geschickt gemacht werden, indem man Verbindungen nach geeigneten Punkten der
erzeugenden Spulen herstellt. In Ankern mit geschlossenem Stromkreise, wie sie bei
Gleichstrommaschinen üblich sind, wird dies am besten erreicht, wenn man vier
Abzweigungen von ebenso viel gleichweit entfernten Punkten oder Streifen des
Commutators macht und jede Ableitung mit einem isolirten Schleifringe auf der Welle
verbindet. Es ist dann jeder der Motorstromkreise mit zwei einander genau
gegenüberliegenden Streifen des Commutators verbunden. Bei einer solchen Anordnung kann der Motor
auch mit halbem Potential arbeiten und in Dreidrahtleitungen, wenn man die
Motorstromkreise in richtiger Ordnung mit dreien der Contactringe verbindet.
Mehrpolige Maschinen werden für den gedachten Zweck geeignet gemacht, wenn man auf
dem Anker zwei Reihen von Spulen so wickelt, daſs die eine Reihe derselben den
stärksten Strom erzeugt, wenn die andere genau oder nahezu in ihrer neutralen
Stellung ist, wobei beide Spulenreihen gleichzeitig oder nach einander der
inducirenden Wirkung der Feldmagnete ausgesetzt sind.
Im Allgemeinen werden die Stromkreise im Motor ähnlich angeordnet. Am einfachsten und
zweckmäſsigsten ist es aber, primäre Stromkreise auf feststehenden Theilen des
Motors anzuordnen und dabei Schleifcontacte zu vermeiden. Die Magnetspulen werden
dann abwechselnd zu den beiden Stromkreisen verbunden, also die Nummern 1, 3, 5
u.s.w. zu dem einen, 2, 4, 6 u.s.w. zu dem anderen. Die Spulen derselben Reihe
werden entweder alle in derselben Weise, oder abwechselnd in entgegengesetztem Sinne
verbunden; im letzteren Falle wird ein Motor mit der halben Polzahl erhalten.
Die Anwendung mehrpoliger Motoren bietet bei einer derartigen Einrichtung der
Maschinen den bei dem Gleichstrombetriebe nicht erreichbaren Vortheil, daſs der
Motor genau mit der vorher bestimmten Geschwindigkeit läuft, unbeeinfluſst von
Unvollkommenheiten der Ausführung, von der Belastung und innerhalb bestimmter
Grenzen auch unbeeinfluſst von der elektromotorischen Kraft und der Stromstärke.
Für eine Anlage zur allgemeinen Vertheilung des Stromes empfiehlt Tesla folgenden Plan zu Grunde zu legen. In der
Centralstation ist ein Stromerzeuger mit einer beträchtlichen Anzahl von Polen zu
verwenden. Die von demselben getriebenen Motoren sollen „synchrone“ sein,
aber genügende Drehwirkung beim Angehen besitzen. Unter Beobachtung bestimmter
Bauregeln mag die Geschwindigkeit jedes Motors nahezu im umgekehrten Verhältnisse zu
seiner Gröſse stehen, und die Polzahl soll dementsprechend gewählt werden. Nur bei
ausnahmsweisen Anforderungen soll man von dieser Regel abgehen. Mit Rücksicht
hierauf ist es vortheilhaft, jeden Motor mit einer gröſseren Zahl von Polvorsprüngen
oder Spulen zu versehen; deren Zahl soll vorzugsweise ein Vielfaches von 2 oder 3
sein. Durch einfache Veränderung der Verbindung der Spulen kann man dann den Motor
für verschiedene Anforderungen zweckentsprechend machen.
In den jetzt gebräuchlichen Stromumsetzern (Transformatoren) werden die Ströme im
secundären Stromkreise durch Veränderung der Stärke der primären oder erregenden
Ströme erzeugt. Findet hier eine Proportionalität zum Eisenkerne statt, so wird die
auf die secundäre Spule ausgeübte Inductionswirkung proportional sein der Summe der
in der Zeiteinheit
stattfindenden Stärkenänderungen in dem erzeugenden Strome. Hieraus folgt, daſs für
eine gegebene Aenderung die Verlängerung des primären Stromes einen entsprechenden
Verlust zur Folge haben wird. Um schnelle Veränderungen in der Stromstärke, wie sie
für wirksame Induction erforderlich sind, zu erhalten, muſs eine groſse Zahl von
Schwingungen angewendet werden. Hierdurch werden aber die Kosten erhöht, und die
Nutzwirkung des Erzeugers wird verringert; es wird mehr Arbeitskraft durch Erhitzung
des Kernes verloren und die Leistung des Umsetzers verringert, weil der Kern, in
Folge der zu schnellen Umkehrungen, nicht vollständig nutzbar gemacht wird. Durch
Anwendung von Tesla's Verschiebung der Pole in einem
Umsetzer werden diese Nachtheile vermieden.
In Fig. 18 ist nach Power-Steam vom Mai 1889 * S. 10 ein Wechselstrommotor von Tesla ohne Commutator abgebildet. Er enthält eine Reihe
von Feldmagneten mit zwei Gruppen von Spulen, deren Enden an zwei Klemmschrauben
geführt sind, in denen der Betriebsstrom zugeführt wird. Letzterer wird der
gewöhnlichen Beleuchtungsanlage entnommen, aber unter Anwendung einer Rückleitung,
welche es möglich macht, daſs gleichzeitig zwei Wechselströme durch das Feld
geleitet werden. Der Anker ähnelt dem gewöhnlichen Siemens-Trommelanker ohne Commutator, seine Wickelung ist aber einfacher,
besteht aus nur wenigen Windungen verhältniſsmäſsig dünnen Drahtes und ist in sich
geschlossen. Dieser Motor ist gedrängter als ein mit unmittelbarem Strome
arbeitender Motor und leichter im Vergleiche zu der gelieferten Kraft.
Fig. 18., Bd. 273, S. 299 6) Die Schuyler-Company (vgl. 1884 254 * 471) gibt dem Anker (Fig. 19), welcher die
Trommelform hat und aus Ringen von Eisenblech zusammengesetzt ist, vier Spulen, die
durch Holzstreifen von einander getrennt sind. Der Anker ist zwecks guter
Ventilation an den Enden offen. Jede Spule besteht aus zwei einander im Durchmesser
gegenüber liegenden Wickelungen, deren innere Enden verbunden sind, um die richtige
Stromrichtung zu sichern. Hierdurch bleiben die beiden Enden an der Auſsenseite
frei, und es ist nicht nöthig die ganze Spule zu erneuern, falls das innere Ende
bricht. Bei dieser Art der Verbindung und unter Benutzung eines Commutators geht der
Strom beständig in
Parallelschaltung durch zwei Spulen und durch eine Spule in Hintereinanderschaltung,
während die vierte zwischen den Bürsten ausgeschaltet ist. Man hat noch den
Vortheil, daſs, falls eine Spule beschädigt wird, die Verbindung mit ihrer Nachbarin
aufgehoben werden und die Maschine mit geringerer Belastung weiter arbeiten kann.
Die Enden der Spulen sind mit einem isolirten Ringe verbunden, von welchem parallel
zur Welle liegende Drähte nach dem Commutator geführt sind. (Electrical World durch Electrical Engineer
vom 19. Oktober 1888 * S. 329.)
7) Nach dem von G. E. Cabanellas in Nanteuil-le-Haudoie,
Frankreich (* D. R. P. Nr. 43910 vom 25. Februar 1886) gemachten Vorschlage werden
die homologen Spulen, d.h. die in gleicher Weise inducirten Spulen einer Dynamo mit
Ringanker und mehr als zwei Polen in folgender Weise geschaltet. Zunächst werden so
viel Gruppen angeordnet, als Polpaare vorhanden sind, wobei die einzelnen Spulen der
Gruppen hinter einander geschaltet sind; ebenso werden auch die Gruppen selbst
hinter einander geschaltet. Liegen bei einem Felde mit erregenden vier Polpaaren auf
dem Anker im Kreise herum auf einander folgend die Spulen 11, 21.... 81, 12
22.... 82, 13, 23
.... 83, 14, 24.... 84
, so sind z.B. die Spulen 71, 72, 73, 74 und die Spulen 81, 82, 83, 84
, in Hintereinanderschaltung zu je einer Gruppe
vereinigt, während durch die Verbindung von 74 mit 81 die Gruppen hinter einander geschaltet werden.
Auf dem Stromsammler sind ebenso viel Streifen als Spulen angebracht, welche in
gleicher Weise wie letztere eingetheilt und geschaltet sind, also 11, 12, 13, 14 und 81, 82, 83, 84 unter einander.
Durch diese Schaltung wird erreicht, daſs nur je eine Spule jeder Gruppe mit je
einem Streifen des Stromsammlers verbunden zu werden braucht, während zwischen den
anderen Spulen und Streifen keine Verbindung erforderlich ist.
Diese Schaltung kann mit einigen Abänderungen auch auf Trommelankern angewendet
werden.
8) Henrion's Dynamo und Regulatoren. Zur Beleuchtung der
jetzigen Pariser Ausstellung (vgl. 1889 273 239) hat die
von Krizik (jetzt in Prag) angegebene sogen.
Pilsen-Lampe (vgl. 1882 243 428. 1884 251 * 68) in einer groſsen Zahl (etwa 160) Verwendung
gefunden. In der Maschinenhalle sind im Schiffe vier solcher Lampen zu 24 Ampère,
sechs zu 8 Ampère in der unteren und zwei in den oberen Gallerien; die vier ersteren
und die vier Paare der letzteren sind parallel geschaltet, wobei jedem Paare etwas
mehr als 2 Ohm und jeder groſsen Lampe 5 Ohm Widerstand zugeschaltet sind. Als Motor
dient eine 24pferdige doppelcylindrige Lenoir-Gasmaschine, die 150 Umdrehungen macht
und die Dynamo mit 680 Umdrehungen mittels Riemen treibt; letztere liefert 150
Ampère bei 110 Volt und wiegt im Ganzen 1680k.
Diese Lampe wird für Frankreich von Fabius Henrion und
Comp. in Nancy geliefert. Die von derselben Fabrik gebaute, in Fig. 20 abgebildete Dynamo erzeugt den Strom für die Pilsen-Lampen
in der Maschinenhalle; sie ist (nach dem Engineer vom
21. Mai 1889 * S. 457) eine Vierpolmaschine mit gemischter Wickelung und besitzt
einen Gramme'schen Scheibenanker. Fuſsplatte,
Feldelektromagnetträger und Lager sind in einem Stücke gegossen. Der Anker, welcher
auf einen weichen Eisendrahtkern gewickelt ist, ist an einer Kupferscheibe
befestigt, deren Rand so gebogen ist, daſs er den inneren Rand der Spule umfaſst.
Letztere ist dann centrirt und wird durch Kupferarme in ihrer Stellung erhalten, die
an einem Ende an die Scheibe angenietet sind. Die Verbindung der sich im Durchmesser
gegenüber liegenden Spulen, welche in einer Vierpolmaschine beständig das nämliche
elektrische Potential besitzen, ist in gewöhnlicher Weise durch eine Reihe von
Messingringen hergestellt, welche gegen einander isolirt sind und neben einander
längs der Welle zwischen Anker und Commutator angebracht sind; jeder Ring bildet
eine obere und untere Verbindung zu einem Paare gegenüberliegender Spulen. Diese
Ringe nehmen eine nahezu der Länge der Feldmagnete gleiche Länge des Schaftes ein,
so daſs der Commutator und die Bürsten ganz frei liegen. Es sind bloſs zwei Gruppen
von Bürsten vorhanden; diese stehen um 90° von einander ab und lassen sich mit
einander auf einem beweglichen Rahmen drehen. Jede Gruppe enthält zwei Bürsten und
jede derselben kann unabhängig von der anderen auf den richtigen Druck eingestellt
werden.
Fig. 20., Bd. 273, S. 301 Nachdem die Bürste H (Fig. 21) in den Halter
eingesteckt und in ihm durch die Schraube N festgemacht
ist, kann sie durch Bewegung des Handgriffes H gegen
die Feder S von dem Commutator C entfernt werden oder auf ihn aufgelegt, unter entsprechender Regulirung
des Druckes; in der ihr ertheilten Stellung wird dann die Bürste durch Einschrauben
des Handgriffes selbst festgemacht.
Jede Dynamo mit guter gemischter Wickelung besitzt doch nur bei einer bestimmten
Geschwindigkeit die richtige Wickelung. Daher wird bei Beleuchtung von Fabriken, wo
die Maschine von der Fabriksmaschine oder Betriebswelle aus getrieben wird, eine
weitere Regulirung der Geschwindigkeit nöthig. Einen guten Regulator hat Henrion entworfen und schon bei vielen Anlagen mit
Erfolg angewendet. Derselbe ist in Fig. 22 abgebildet; seine
Aufgabe ist die selbstthätige Einschaltung von Widerständen in die
Nebenschluſswindungen der Feldmagnete bei zu groſser Geschwindigkeit und umgekehrt.
Durch Geschwindigkeitsänderungen herbeigeführte Aenderungen in der Stärke des durch
die Maschine in den Lamperistromkreis gelieferten Stromes werden also durch
Widerstandsrollen von richtiger Gröſse ausgeglichen. In erster Linie wird auf
mechanische Weise einem zwei Sperrkegel R tragenden
Hebel eine hin und her gehende Bewegung ertheilt. In Fig. 22 geschieht dies
durch einen Riemen, der von der Dynamowelle oder einer anderen Welle um die am
unteren Ende sichtbare Rolle gelegt ist; in dieser Rolle ist in einiger Entfernung
vom Mittelpunkte ein Stift angebracht, welcher in einen Schlitz im unteren Ende des
Hebels hineinragt und somit den Hebel hin und her bewegt. Am oberen Ende des Hebels
befindet sich der Zapfen für einen doppelten Sperrkegel, der sich frei um den Zapfen
drehen kann und für gewöhnlich in seiner Gleichgewichtslage erhalten wird. Auf
derselben Achse mit dem Hebel, jedoch nicht drehbar mit demselben, sitzen zwei
SperrräderIn Fig.
22 ist nur das eine D
gezeichnet., die fest mit einander und mit einem Contactarme C verbunden sind; ihre Zähne sind aber entgegengesetzt
geschnitten. Die Pole zweier über dem Doppelsperrkegel liegenden Elektromagnete S, S sind der Krümmung desselben entsprechend
ausgenommen; geht ein Strom durch einen der Elektromagnete, so zieht er den unter
ihm liegenden Sperrkegel an sich heran und legt dadurch den anderen in die Zähne
seines Sperrrades ein; bei der Drehung des Hebels wird daher das eine Sperrrad um
einen Zahn fortgeschoben und der Umschalterarm C
mitgenommen, also Widerstand ein- oder ausgeschaltet. Die beiden Klemmschrauben (+
und –) der Maschine, deren Potential bei veränderlicher Geschwindigkeit unverändert
erhalten werden soll., sind unmittelbar mit dem oben liegenden Solenoid A aus dünnem Drahte verbunden. Bei regelrechter
Thätigkeit der Maschine wird der Eisenkern des Solenoids in einer bestimmten Lage in
der Rolle A erhalten; wächst aber das Potential der
Dynamo, so wird der Kern nach unten gezogen und schlieſst so einen Stromweg nach dem
linken Elektromagnete S; nun ist aber der Kern selbst
durch ein biegsames Glied mit dem einen Pole der Maschine verbunden, der andere Pol dagegen mit den
inneren (unteren) Enden der Rollen S, S; daher geht bei
der Zunahme des Potentials ein Strom durch den linken Elektromagnet S, zieht den linken Sperrkegel an, legt den rechten in
sein Sperrrad und dreht den Contactarm C nach links, so
daſs mehr Widerstand in den Nebenschluſsstromkreis der Feldmagnete eingeschaltet
wird und dadurch das Potential wieder vermindert wird. Beim Fallen des Potentials
geht der Kern an den oberen Contact hinauf, der rechte Elektromagnet S kommt zur Wirkung, C
wird nach links bewegt und eine entsprechende Zahl von Widerstandsrollen
ausgeschaltet.
Eine gleiche Anordnung hat Henrion auch einem
selbsthätigen Regulator der Bürstenstellung gegeben. Die Stellung der Bürsten auf
dem Stromsammler (Commutator) hängt bloſs von dem von der Dynamo gelieferten Strome
ab; deshalb ist das in Fig. 23 oben sichtbare,
die Regulirung vermittelnde Solenoid A aus dickem
Drahte gewickelt und vom Hauptstrome durchlaufen. Der Kern dieses Solenoids spielt
wieder zwischen einem oberen und einem unteren Contacte, welche genau wie in Fig. 22 mit
zwei Solenoiden S aus feinem Drahte verbunden sind. Die
beiden entgegengesetzt geschnittenen Reihen von. Sperrradzähnen sind auf einem
Viertelkreisbogen angebracht und mit dem hin und her beweglichen Rahmen verbunden,
der die Bürsten tragt; das Ganze wird selbsthätig vorwärts und rückwärts geschoben,
wenn die Stromstärke zu- oder abnimmt. In diesem Regulator wird die schwingende
Bewegung dem Hebel, welcher die beiden Sperrkegel trägt, durch das in Fig. 24
sichtbare groſse Zahnrad mitgetheilt. Ein an der Stirnfläche dieses Rades sitzender
Stift wirkt in einem Schlitze des Hebels. Das groſse Zahnrad wird durch ein
kleineres in Umdrehung versetzt, welches seinerseits durch eine in Fig. 24 nicht sichtbare,
auf derselben Achse hinter dem Apparate sitzende Schnurscheibe getrieben wird.
Tafeln