| Titel: | Siemens und Halske's Universal-Anzeiger. |
| Fundstelle: | Band 276, Jahrgang 1890, S. 410 |
| Download: | XML |
Siemens und Halske's
Universal-Anzeiger.
Mit Abbildungen auf Tafel
20.
Siemens und Halske's Universal-Anzeiger.
Der nach dem Centralblatte für Elektrotechnik, Bd. 12 *
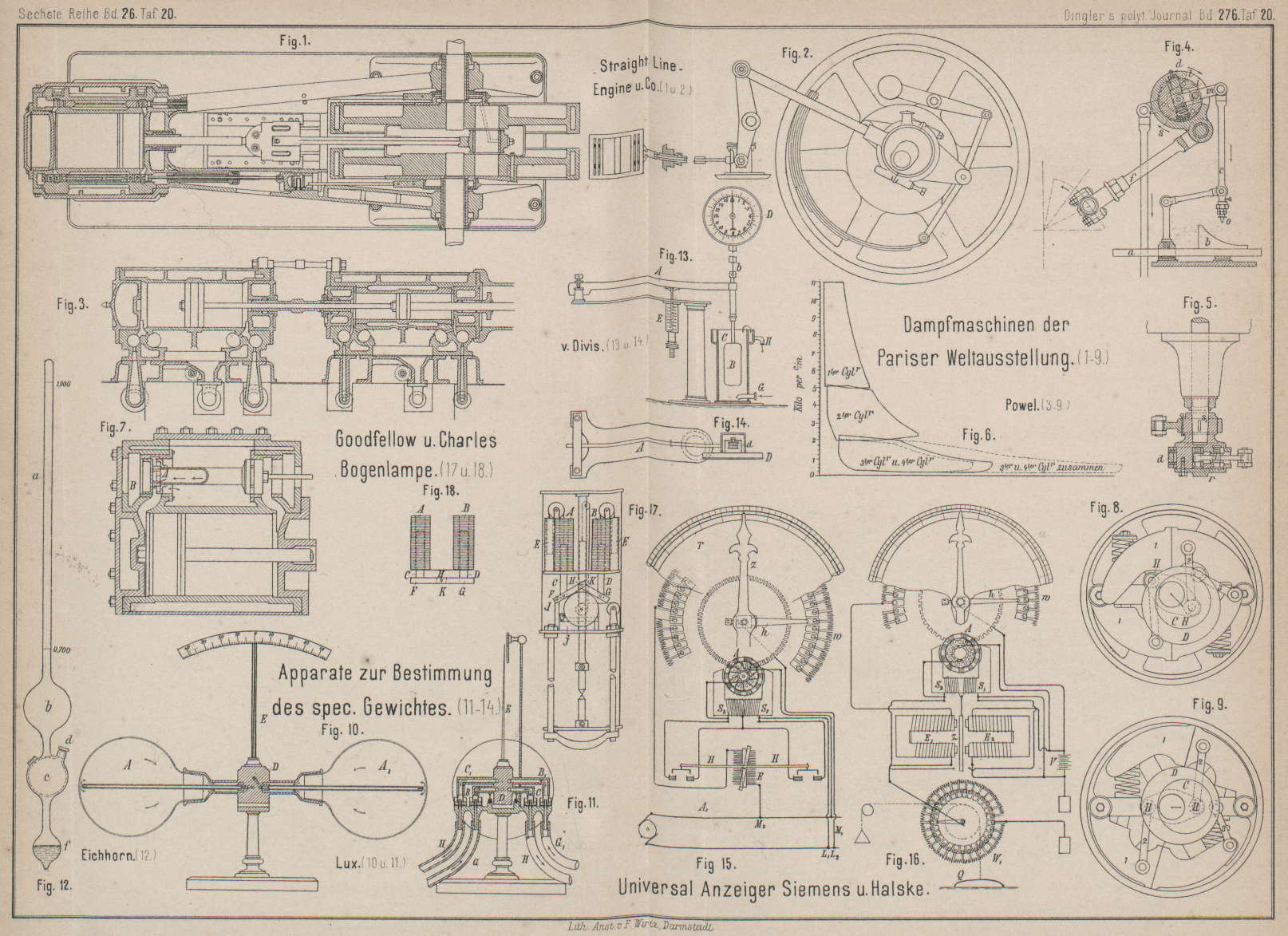
S. 22, in Fig.
15 und 16 dargestellte elektrische Anzeiger (Indicator) von Siemens und Halske in Berlin soll die Veränderungen
irgend welcher Gröſse, wie der Potentialdifferenz an zwei Punkten eines
Stromkreises, des Wasserstandes in einem Behälter, der Schnelligkeit der Bewegung in
Wasserläufen und Aehnliches auf beliebige Entfernungen anzeigen.
Für die Anzeige von Schwankungen in der Potentialdifferenz zwischen zwei Leitern A1 und A2 zweigt man nach Fig. 15 an
diesen Drähten zwei Schleifen ab. Die eine Schleife M1
L1 (die
Regulatorschlieſsung) enthält hinter einander geschaltet die Rollen s1 und s2 der Elektromagnete
und die Ankerwickelung eines Elektromotors A. In der
von M2 und L2 abgehenden zweiten
Schleife (der Meſsleitung oder eigentlichen Indicatorschlieſsung) liegen die Rolle
E, die Widerstände w
und der Contact h des Zeigerwerks. Der Anker der Rolle
E trägt einen Balken H, der bei seiner Bewegung in Folge der Aenderungen der Potentialdifferenz
zwischen A1 und A2 die eine oder die
andere der Rollen s1
und s2, deren Wirkungen
für gewöhnlich sich aufheben, kurz schlieſst, wodurch die zweite das Uebergewicht
über die andere bezüglich ihres Einflusses auf den Anker des Motors A bekommt und letzteren in jenem Sinne, welcher der
Aenderung der Potentialdifferenz zwischen A1 und A2 entspricht, bewegt und durch h eine Anzahl der Widerstände w in die Schlieſsung von E einschaltet, oder
aus derselben ausschaltet, die Stromstärke auf die normale Gröſse und H in die wagerechte Stellung zurückbringt. H bleibt nun stillstehen und der Zeiger Z gibt die herrschende Potentialdifferenz zwischen A1 und A2 an.
In Fig. 16 ist
der Grundgedanke auf einen elektrischen Wasserstandsanzeiger angewendet. Das
Solenoid E in Fig. 15 ist hier durch
die beiden Elektromagnete E1 und E2
ersetzt, welche sich mit entgegengesetzten Polen gegenüberstehen und zwischen
welchen sich ein Anker z befindet. Letzterer schlieſst
eine der Rollen s1 und
s2 kurz, je nachdem
er von E1 oder E2 angezogen wird. Dies
tritt aber ein, je nachdem der Schwimmer Q durch Rolle
und Zeiger den Widerstand W1 vermehrt, oder verringert und damit die Gleichheit der von der Batterie
V in die beiden Zweige gesandten Ströme stört. Der
Anker des Motors A geräth nun in Bewegung und steht
erst still, wenn der Zeiger h in dem zweiten Zweige den
Widerstand jenem im anderen Zweige wieder gleich gemacht hat.
Tafeln